
RVIZ shows "Uninitialized quaternion, assuming identity." when displaying Octomap mapping
Dear community, While visualizing the octomap_mapping in RVIZ, I am getting an error stating "Uninitialized quaternion, assuming identity. [Image attached], due to which my octomap maps the environment BUT very scattered and un-updated.
I am getting left/right images along with camera information from CoppeliaSim (previously VREP) and later find pointclouds2 using Stereo_Image_proc ROS package. The pointcloud is then subscribed by the octomap_mapping along with /tf data. The /tf frames while visualizing in rviz seems working perfectly. I do not know what am i doing wrong.
Can someone please help me in identifying the issue?
Thank you and regards.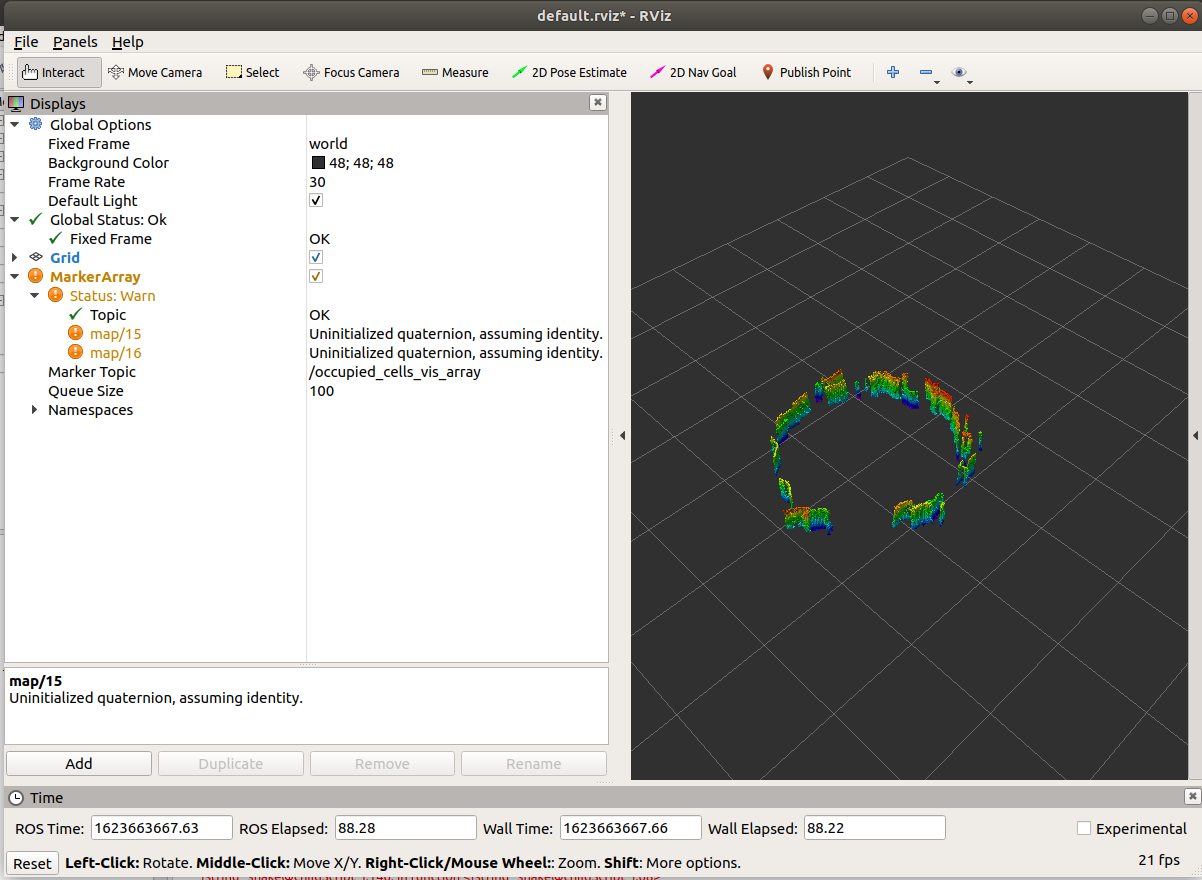
EDIT: So I fixed the problem. Actually, my /tf transformation was wrong. We need a transformation from sensor's frame (in my case that is the Stereo_frame) to the fixed frame (which in my case is the world frame) . My /tf tree now looks like /stereo_frame -> base_frame -> world_frame.

I also exactly got same error. My Octomap is also not updating. Have you got any solution? or is there anyone can help?
No I am still working on it and I have tried multiple methods and different techniques to solve the issue but haven't got any success yet. Will surely update here if got any fix.