IMU driver REP-103 and REP-145
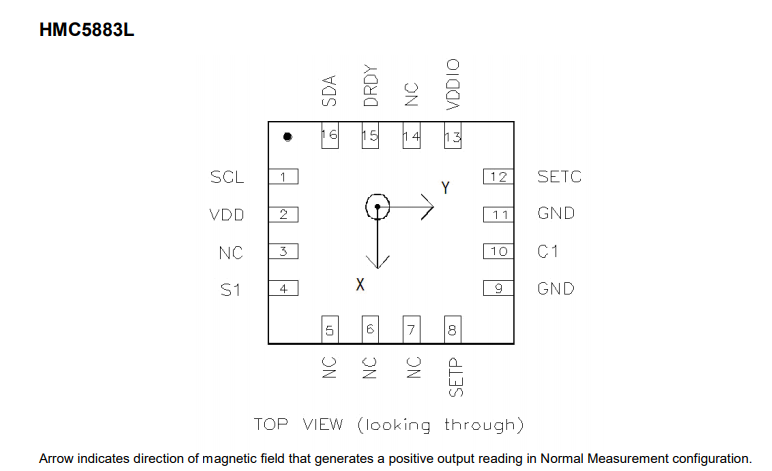
Hi, I'm working on a robot localization project. I'm using an IMU (gyro+accel) a magnetometer (HMC5883) and a GPS. I've read REP103 and REP145 in order to publish IMU's data. I'm a little confused about magnetometer. My mag is mounted with X axis forward, Y left and Z up. In this orientation I get follow measurements (southern hemisphere):
Pointing North: X = + Max, Y = 0, Z = positive
Pointing Est: X = 0, Y = +Max, Z = positive
Pointing South: X = - Max, Y = 0, Z = positive
Pointing Est: X = 0, Y = -Max, Z = positive
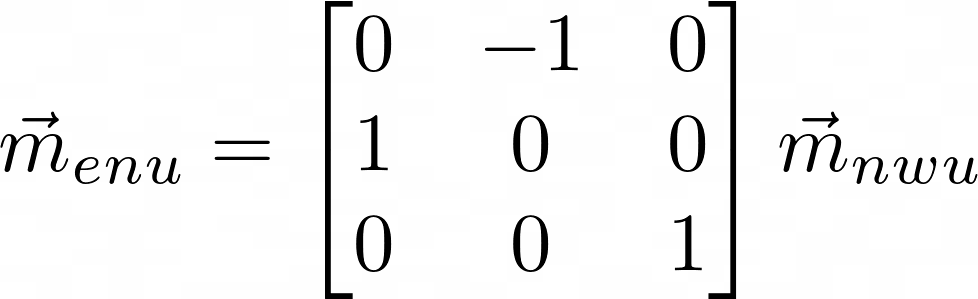
So, it's reporting in ENU coordinate frame, right?
Then REP103 says: "By the right hand rule, the yaw component of orientation increases as the child frame rotates counter-clockwise, and for geographic poses, yaw is zero when pointing east."
So, it seems that atan2(mag_y, mag_x) is the way to do this:
Pointing east -> atan2(+, 0) = 0 pointing north -> atan2(0, +) = 90
So, going counter clockwise (East to North) the yaw angle increase.
Is my analysis right? because I'm not getting right output from RL....
Thank

 It should be on the bottom right corner of your robot (as you confirmed in the comments below).
It should be on the bottom right corner of your robot (as you confirmed in the comments below).