
Problem with grey(empty spots) on global_costmap inflater layer

Hi, I am using my own diff-drive robot on ROS Melodic on Ubuntu 18.04.
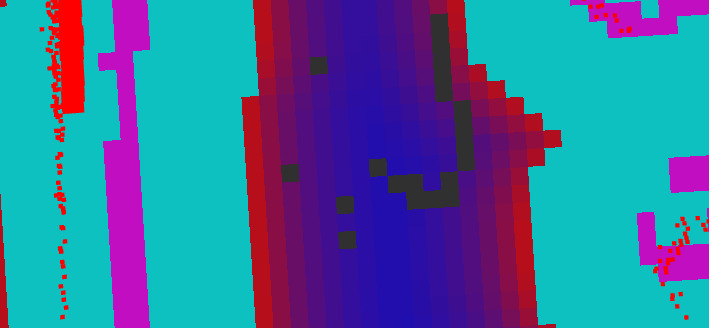
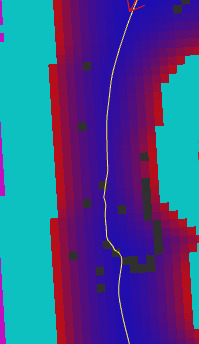
When creating global plan, value of starting point on global costmap is erased. The problem is that global costmap is not refreshed and after multiple rides, I have many empty pixels. Thus next global paths are very curved. I will be really gratefull for some tip!
My costmap parameters:
global_frame: map
robot_base_frame: base_link
rolling_window: false
obstacle_layer:
enabled: false
update_frequency: 10
publish_frequency: 1
cost_scaling_factor: 6
inflation_radius: 2
raytrace_range: 2
resolution: 0.025
robot_radius: 0.35
footprint_padding: 0
transform_tolerance: 0.5
track_unknown_space: false
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflater_layer, type: "costmap_2d::InflationLayer"}
obstacle_layer:
footprint_clearing_enabled: false
observation_sources: scan
scan:
marking: true
clearing: true
data_type: LaserScan
topic: sick_safetyscanners/scan
sensor_frame: base_link
inf_is_valid: false
add a comment
