
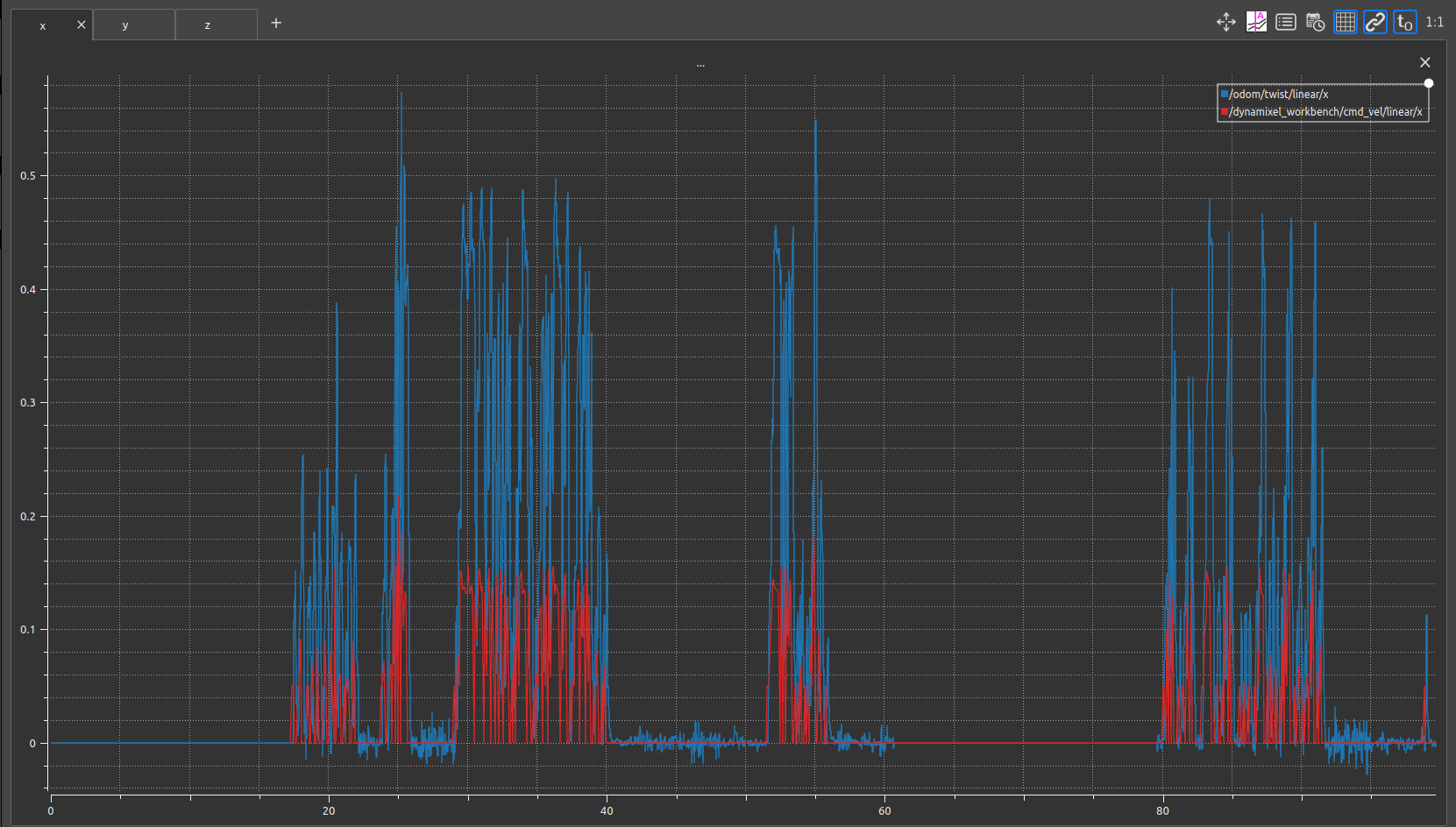
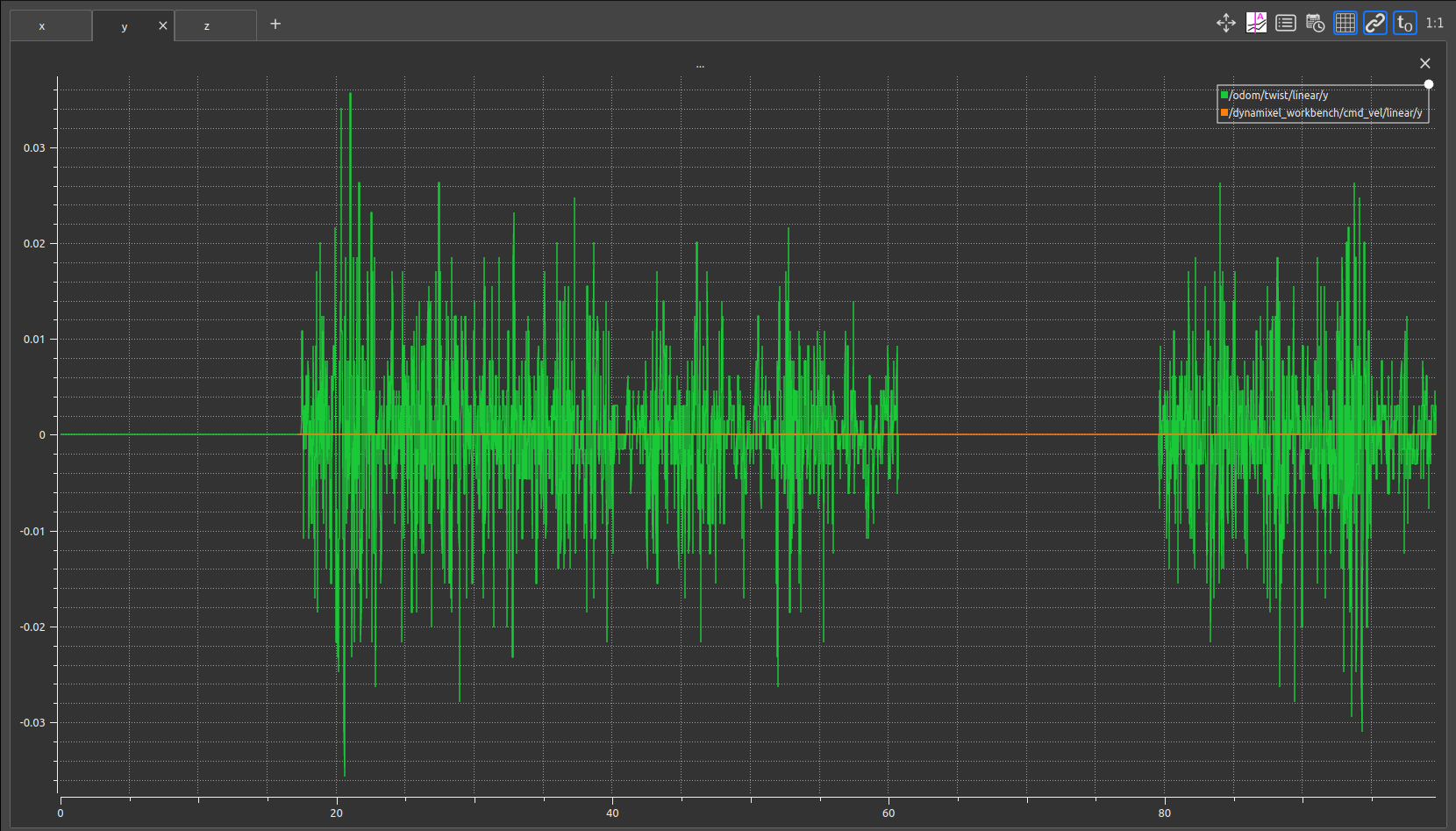
odom_vel, cmd_vel, trajectory planner

Hi there,
Is it right or wrong the correlation between these two types of data, what's your opinion?
I am trying to fix a problem in the motion planning
My problem is after giving a navigation goal in rviz the robot starts rotating even though the goal is 0.5 m straight ahead of it, sometimes achieves the goal but doing a weird movement.
I think the solution is tweaking the params in trajectory planner can someone help where to focus?

TrajectoryPlannerROS:
#Set the acceleration limits of the robot
acc_lim_theta: 0.1
acc_lim_x: 0.1
acc_lim_y: 0.1 #if it's not good change it to 1.5
#Set the velocity limits of the robot
max_vel_x: 0.1 #if its wrong change the max & min vel to 0.4 and -0.4
min_vel_x: 0.05 # make sure min_vel_x * sim_time <2 * xy_goal_tolerance
max_vel_y: 0.1
min_vel_y: -0.1
max_vel_theta: 0.1
min_vel_theta: -0.1
min_in_place_vel_theta: 0.1
#y_vels: [-0.6, -0.24, 0.24, 0.6]
controller_frequency: 5.0
#The velocity the robot will command when trying to escape from a stuck situation
escape_vel: -0.2
#For this example, we'll use a holonomic robot
holonomic_robot: true
#Set the tolerance on achieving a goal
xy_goal_tolerance: 0.05 # m
yaw_goal_tolerance: 0.05 # rad
latch_xy_goal_tolerance: false
#We'll configure how long and with what granularity we'll forward simulate trajectories
sim_time: 1.0
sim_granularity: 0.025 # meter
vx_samples: 10
vy_samples: 10
vtheta_samples: 30
#Parameters for scoring trajectories
meter_scoring: true # true: unit is meter, false: cell
path_distance_bias: 1.0 # max is 5
goal_distance_bias: 1.0 # max is 5
heading_scoring: false
heading_lookahead: 0.3 # meter
heading_scoring_timestep: 0.5 # secs
#We'll use the Dynamic Window Approach to control instead of Trajectory Rollout for this example
dwa: false
#How far the robot must travel before oscillation flags are reset
oscillation_reset_dist: 0.01
#Eat up the plan as the robot moves along it
prune_plan: true

well its rotating because it is stuck and is performing a recovery behavior
maybe this is because your laserscan is not aligned with your costmaps correctly, can you send a photo of your costmap and your laserscan ontop of the costmap