Transform from ____ to ____ was unavailable for the time requested. Using latest instead.
When I run robot_localization in simulation I get the following warning every 2 seconds
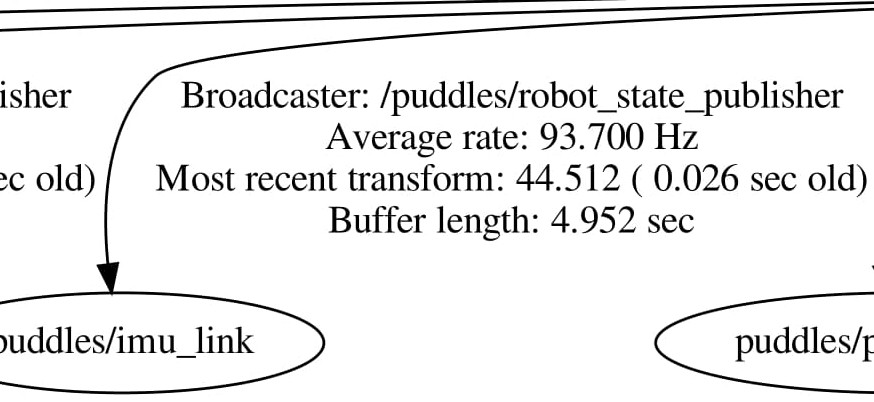
[ WARN] [1599417511.143838658, 4.002000000]: Transform from puddles/imu_link to puddles/base_link was unavailable for the time requested. Using latest instead.
While this warning does not cause any immediate issues, I am concerned it means I have poorly implemented tf or simulated time somewhere. This occurs in simulation but I have been unable to test it on our actual system. I have use_sim_time set to true, all of my tf publishers are publishing very frequently, and the only way I can get the warning to go away is to set a transform_timeout in robot_localization, which causes failed to update warnings. The systems I have tested this on have been Ubuntu 18.04 ROS Melodic.
This is an underwater application, so I only have 3 sensors, IMU, depth, and DVL. IMU is the only sensor that has ever been referred to in this warning. Here are some more information about my system.


EKF_localization_node params
frequency: 30
silent_tf_failure: false
two_d_mode: false
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
debug_out_file: /path/to/debug/file.txt
publish_tf: true
publish_acceleration: false
imu0: imu/data
imu0_config: [false, false, false,
true, true, true,
false, false, false,
true, true, true,
true, true, true]
imu0_queue_size: 5
imu0_remove_gravitational_acceleration: true
gravitational_acceleration: 9.81604
twist0: dvl/twist
twist0_config: [false, false, false,
false, false, false,
true, true, true,
false, false, false,
false, false, false]
pose0: depth/pose
pose0_config: [false, false, true,
false, false, false,
false, false, false,
false, false, false,
false, false, false]
IMU message published at 100 Hz:
header:
seq: 1953
stamp:
secs: 19
nsecs: 716000000
frame_id: "puddles/imu_link"
orientation:
x: 0.0523333914357
y: -0.35588218556
z: 0.0330905279149
w: 0.932477400854
orientation_covariance: [0.0001, 0.0, 0.0, 0.0, 0.0001, 0.0, 0.0, 0.0, 0.0001]
angular_velocity:
x: -3.59392461073e-11
y: 8.47498014701e-12
z: -2.18380955198e-11
angular_velocity_covariance: [1.1519236000000001e-07, 0.0, 0.0, 0.0, 1.1519236000000001e-07, 0.0, 0.0, 0.0, 1.1519236000000001e-07]
linear_acceleration:
x: 6.53786067743
y: 0.726375271311
z: 7.26436473382
linear_acceleration_covariance: [1.6e-05, 0.0, 0.0, 0.0, 1.6e-05, 0.0, 0.0, 0.0, 1.6e-05]
If you know anything about what this warning is referring to, how to fix it, or how to suppress it, please let me know