
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
The reason you see that warning is that you are using a state_publisher node that isn't publishing the static transforms on the latched /tf_static topic. It's publishing them at a fixed frequency, so once in a while, the state estimation node asks for a transform that hasn't been published yet.
You can safely ignore the warning, since the latest transform that it falls back to is always the same. However, if it bothers you, you can set the use_tf_static to true on your state_publisher node. See this wiki page for details:
http://wiki.ros.org/robot_state_publisher
| | 2 | No.2 Revision |
The reason you see that warning is that you are using a state_publisher node that isn't publishing the static transforms on the latched /tf_static topic. It's publishing them at a fixed frequency, so once in a while, the state estimation node asks for a transform that hasn't been published yet.
You can safely ignore the warning, since the latest transform that it falls back to is always the same. However, if it bothers you, you can set the use_tf_static to true on your state_publisher node. See this wiki page for details:
http://wiki.ros.org/robot_state_publisher
EDIT in response to comments:
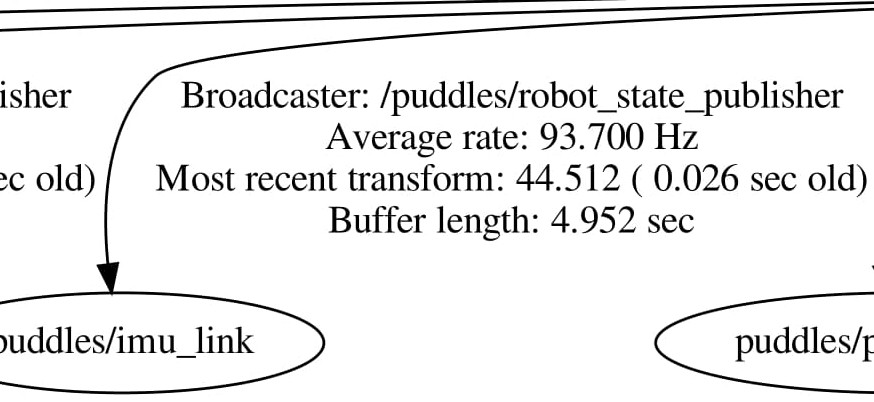
Some of your links are using static transforms when you do that (they show up as 10000 Hz), but your IMU link is not (same for a few others). It still shows up as being published at 93 Hz, as do a bunch of your other links. Any chance your URDF doesn't have your imu_link as a fixed joint?
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
