
Accuracy of KDLs ChainIdSolver_RNE [closed]
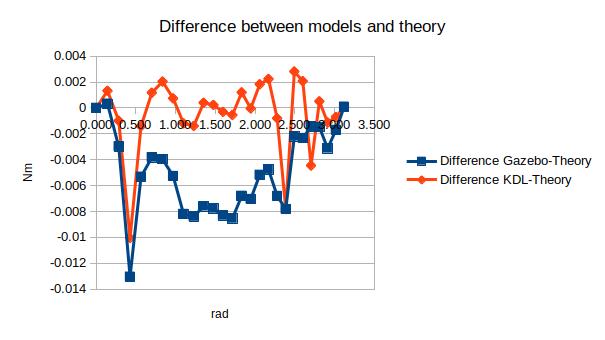
Hi everyone, I was wondering, have there been some tests of how accurate the results from the ChainIdSolver_RNE from KDL are? I tested with a simple inverted pendulum in gazebo. I moved the pendulum with rviz moveit to different positions and compared the results from KDL with the ones from gazebo and the theoretical value (calculated "by hand"). The results were pretty good, with KDL being slightly closer to the theoretical value (see picture). The results were pretty good, with KDL being slightly closer to the theoretical value. When I tested it with a simulated UR3e and compared KDL and gazebo (I didn't calculate the theoretical value here), the differences were much bigger. Has anybody else done some tests like this before and could tell me how accurate KDL is (under the idealistic assumption that the URDF model is perfectly accurate)? I am using ROS melodic on ubuntu 18.04.4. KDL version 1.4.0.

Looks like you've already cross-posted this to orocos/orocos_kinematics_dynamics#275.
Please do not do that.
I'll close this one then.