
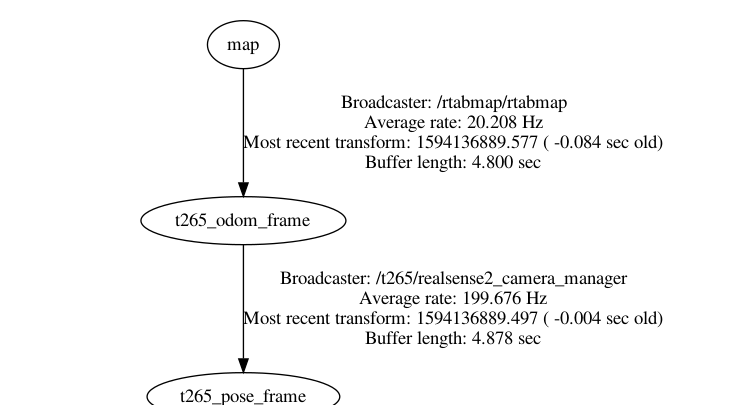
Change default mapping between frame "t265_odom_frame" and "map"

When I call roslaunch realsense2_camera rs_rtabmap.launch to run rtabmap using T265 and D435, the mapping relationship between T265 and fixed frame is set by /rtabmap/rtabmap. I want to change the mapping between T265 and map, and mapping between T265 and D435.
Here is the content of rtabmap
<launch>
<!-- Convenience launch file to launch odometry, rtabmap and rtabmapviz nodes at once -->
<!-- For stereo:=false
Your RGB-D sensor should be already started with "depth_registration:=true".
Examples:
$ roslaunch freenect_launch freenect.launch depth_registration:=true
$ roslaunch openni2_launch openni2.launch depth_registration:=true -->
<!-- For stereo:=true
Your camera should be calibrated and publishing rectified left and right
images + corresponding camera_info msgs. You can use stereo_image_proc for image rectification.
Example:
$ roslaunch rtabmap_ros bumblebee.launch -->
<!-- Choose between depth and stereo, set both to false to do only scan -->
<arg name="stereo" default="false"/>
<arg if="$(arg stereo)" name="depth" default="false"/>
<arg unless="$(arg stereo)" name="depth" default="true"/>
<!-- Choose visualization -->
<arg name="rtabmapviz" default="true" />
<arg name="rviz" default="false" />
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<!-- sim time for convenience, if playing a rosbag -->
<arg name="use_sim_time" default="false"/>
<param if="$(arg use_sim_time)" name="use_sim_time" value="true"/>
<!-- Corresponding config files -->
<arg name="cfg" default="" /> <!-- To change RTAB-Map's parameters, set the path of config file (*.ini) generated by the standalone app -->
<arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="camera_link"/> <!-- Fixed frame id, you may set "base_link" or "base_footprint" if they are published -->
<arg name="odom_frame_id" default=""/> <!-- If set, TF is used to get odometry instead of the topic -->
<arg name="map_frame_id" default="map"/>
<arg name="ground_truth_frame_id" default=""/> <!-- e.g., "world" -->
<arg name="ground_truth_base_frame_id" default=""/> <!-- e.g., "tracker", a fake frame matching the frame "frame_id" (but on different TF tree) -->
<arg name="namespace" default="rtabmap"/>
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="queue_size" default="10"/>
<arg name="wait_for_transform" default="0.2"/>
<arg name="args" default=""/> <!-- delete_db_on_start, udebug -->
<arg name="rtabmap_args" default="$(arg args)"/> <!-- deprecated, use "args" argument -->
<arg name="launch_prefix" default=""/> <!-- for debugging purpose, it fills launch-prefix tag of the nodes -->
<arg name="output" default="screen"/> <!-- Control node output (screen or log) -->
<arg name="publish_tf_map" default="true"/>
<!-- if timestamps of the input topics are synchronized using approximate or exact time policy-->
<arg if="$(arg stereo)" name="approx_sync" default="false"/>
<arg unless="$(arg stereo)" name="approx_sync" default="$(arg depth)"/>
<!-- RGB-D related topics -->
<arg name="rgb_topic" default="/camera/rgb/image_rect_color" />
<arg name="depth_topic" default="/camera/depth_registered/image_raw" />
<arg name="camera_info_topic" default="/camera/rgb/camera_info" />
<arg name="depth_camera_info_topic" default="$(arg camera_info_topic)" />
<!-- stereo related topics ...add a comment
