
publish rtab point cloud from rviz

Hey!
I am currently following this tutorial on my turtlebot: http://wiki.ros.org/rtabmap_ros#Nodes
Therefore I started turtlebot and rviz like this:
$ roslaunch turtlebot_bringup minimal.launch
$ roslaunch rtabmap_ros demo_turtlebot_mapping.launch
$ roslaunch rtabmap_ros demo_turtlebot_rviz.launch
It all works fine but I don't know how to export the point cloud I created. My goal is to have a list of XYZ coordinates from all points. Anyone got any ideas?
EDIT:
I tried to run
rosservice call /rtabmap/get_map 1 0 0
but that does nothing... and when I click the get map option in RVIZ it is first trying to call get_map and then I get the error:
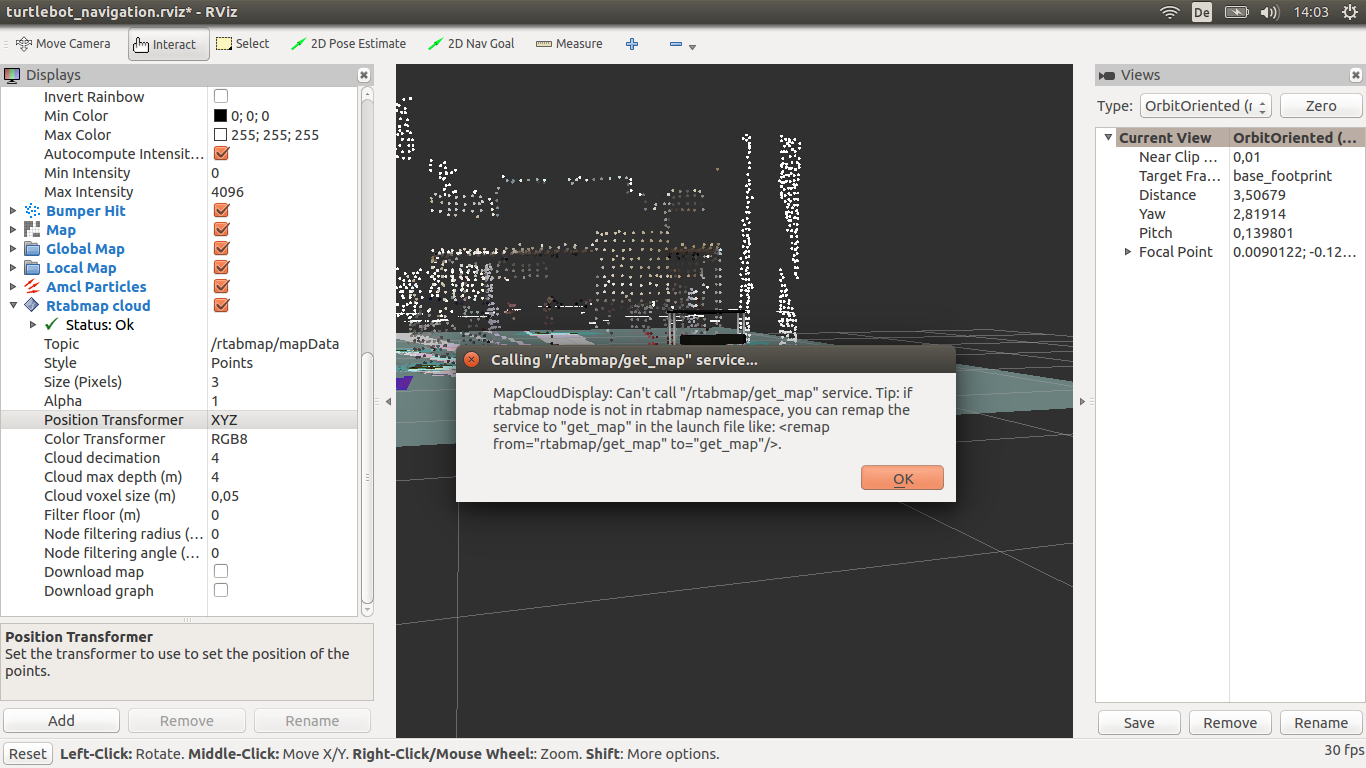
rtab/get_map is in the namespace though. Here is part of my rosservice list:
/rtabmap/backup
/rtabmap/cancel_goal
/rtabmap/get_grid_map
/rtabmap/get_map
/rtabmap/get_proj_map
/rtabmap/list_labels
/rtabmap/octomap_binary
/rtabmap/octomap_full
/rtabmap/pause
/rtabmap/publish_map
/rtabmap/reset
/rtabmap/resume
/rtabmap/rtabmap/get_loggers
/rtabmap/rtabmap/set_logger_level
/rtabmap/set_goal
/rtabmap/set_label
/rtabmap/set_mode_localization
/rtabmap/set_mode_mapping
/rtabmap/trigger_new_map
/rtabmap/update_parameters
/rviz/get_loggers
/rviz/reload_shaders
/rviz/set_logger_level
/turtlebot/invite
/turtlebot/list_rapps
/turtlebot/platform_info
/turtlebot/start_rapp
/turtlebot/stop_rapp
/turtlebot_laptop_battery/get_loggers
/turtlebot_laptop_battery/set_logger_level
add a comment

