
Straightforward movements for local_planner
Hello,
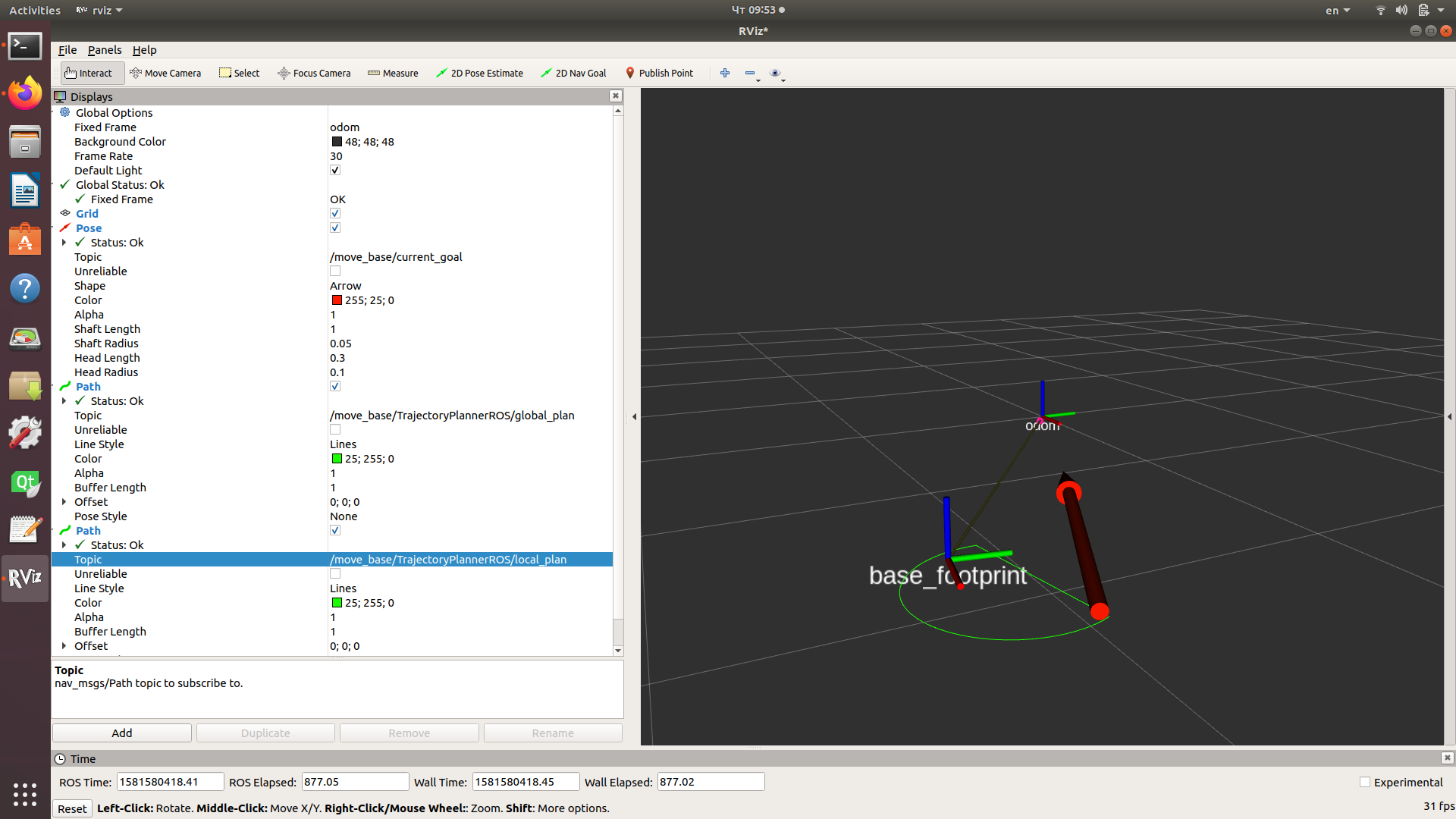
I faced the problem that I want to my robot navigate without curved trajectories (only straightforward motions as much as possible ). I even set carrot_planner for base_global_planner, and it is create a straight path from current position to the goal. However my base_local_planner always perform curved movements and even can't reach the goal, as it is shown in the picture:
I want to perform navigation without map, and currently my lidar is turned off as well. Maybe I will add laser_scan latter. Could someone say how can I use move_base with direct movement and using only odom. Maybe I have to use another base_local_planner, now I am using default TrajectoryPlannerROS, or maybe I have to set specific parameter.
Thank you!!!
add a comment
