
tf error while doing mapping

Hello everyone ,
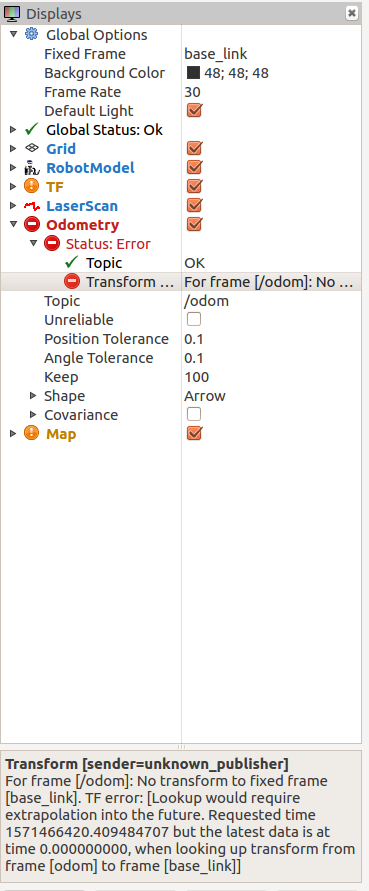
im doing gmapping and i got following errors while launching my file
Transform [sender=unknown_publisher] For frame [/odom]: No transform to fixed frame [base_link]. TF error: [Lookup would require extrapolation into the future. Requested time 1571467069.157320838 but the latest data is at time 0.000000000, when looking up transform from frame [odom] to frame [base_link]]
i tried following this guy solved most of the parts through this program and finally able to get rpm values by doing changes in node and Arduino code and also need extra tip for doing gmapping
here is my code /* author: Sung Jik Cha *credits : ros turtlebot node : https://github.com/Arkapravo/turtlebot arduino ros bridge : http://wiki.ros.org/ros_arduino_bridge **/
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
#include <geometry_msgs/Vector3.h>
#include <stdio.h>
#include <cmath>
#include <algorithm>
#include <robot_specs.h>
double rpm_act1 = 0.0;
double rpm_act2 = 0.0;
double rpm_req1 = 0.0;
double rpm_req2 = 0.0;
double gyro_x = 0.0;
double gyro_y = 0.0;
double gyro_z = 0.0;
double rpm_dt = 0.0;
double x_pos = 0.0;
double y_pos = 0.0;
double theta = 0.0;
ros::Time current_time;
ros::Time rpm_time(0.0);
ros::Time last_time(0.0);
void handle_rpm( const geometry_msgs::Vector3Stamped& rpm) {
rpm_act1 = rpm.vector.x;
rpm_act2 = rpm.vector.y;
rpm_dt = rpm.vector.z;
rpm_time = rpm.header.stamp;
}
void handle_gyro( const geometry_msgs::Vector3& gyro) {
gyro_x = gyro.x;
gyro_y = gyro.y;
gyro_z = gyro.z;
}
int main(int argc, char** argv){
ros::init(argc, argv, "base_controller");
ros::NodeHandle n;
ros::NodeHandle nh_private_("~");
ros::Subscriber sub = n.subscribe("rpm", 50, handle_rpm);
ros::Subscriber gyro_sub = n.subscribe("gyro", 50, handle_gyro);
ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50);
tf::TransformBroadcaster broadcaster;
double rate = 10.0;
double linear_scale_positive = 1.0;
double linear_scale_negative = 1.0;
double angular_scale_positive = 1.0;
double angular_scale_negative = 1.0;
double angular_scale_accel = 1.0;
double acc_theta = 0.0;
double acc_x = 0.0;
double acc_max_theta = 0.0;
double acc_max_x = 0.0;
double alpha = 0.0;
bool publish_tf = false;//whether to publish tf or not. set to false if you want to use robot_pose_ekf
bool use_imu = false;
double dt = 0.0;
double dx = 0.0;
double dy = 0.0;
double dth_odom = 0.0;
double dth_gyro = 0.0;
double dth = 0.0;
double dth_prev = 0.0;
double dth_curr = 0.0;
double dxy_prev = 0.0;
double dxy_ave = 0.0;
double vx = 0.0;
double vy = 0.0;
double vth = 0.0;
char base_link[] = "/base_link";
char odom[] = "/odom";
ros::Duration d(1.0);
nh_private_.getParam("publish_rate", rate);
nh_private_.getParam("publish_tf", publish_tf);
nh_private_.getParam("linear_scale_positive", linear_scale_positive);
nh_private_.getParam("linear_scale_negative", linear_scale_negative);
nh_private_.getParam("angular_scale_positive", angular_scale_positive);
nh_private_.getParam("angular_scale_negative", angular_scale_negative);
nh_private_.getParam("angular_scale_accel", angular_scale_accel);
nh_private_.getParam("alpha", alpha);
nh_private_.getParam("use_imu", use_imu);
ros::Rate r(rate);
while(n.ok()){
ros::spinOnce();
ros::topic::waitForMessage<geometry_msgs::Vector3Stamped>("rpm", n, d);
current_time = ros::Time::now();
dt =(current_time-last_time).toSec();
dxy_ave = (rpm_act1+rpm_act2)*dt/(60*2); //speed
dth_odom = ((rpm_act2-rpm_act1)*dt)/(60*track_width);
if(dxy_ave>0.0)
{
ROS_INFO("dxy_ave:%f, dth_odom:%f",dxy_ave,dth_odom);
}
// if (use_imu) dth_gyro = dt*gyro_z;
dth = dth_odom;
if ...