
rtabmap Export 3D clouds(map) problems
Hi!
When i use kinect2 camera to run rtabmap , the .ply file i export looks good.But when i use Stereo camera( the data from KITTI ), the .ply files looks wrong.I think it may be 2D?(but it is good by RGBD camera.)
Here is what it should be:
 and
and
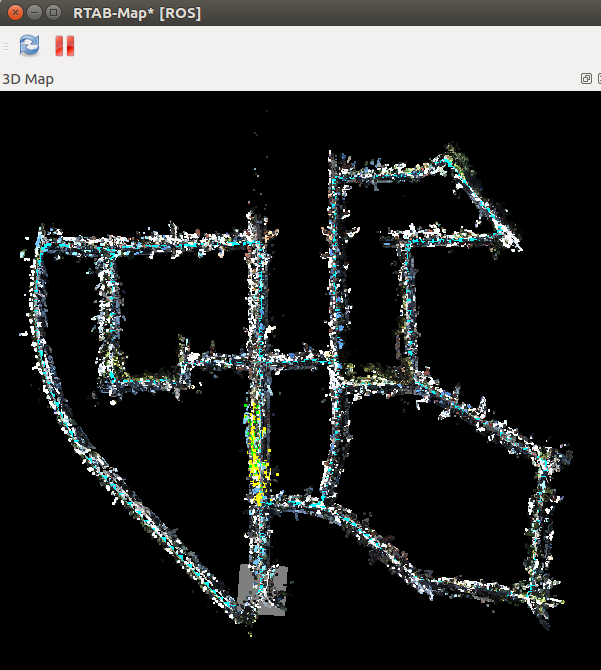
But it looks:

I find 3d points clouds is not the points clouds showed in 3D Map! How to export the points clouds in 3D Map? Any help would be appreciated!

Is the camera calibrated? images rectified? Do you have a database to share? Are you showing data of the same database in all screenshots above?