large kitti data map(or LoopClosure) make rtabmap_ros and the whole ubuntu crash!
I successfuly run rtabmap_ros by kitti2rosbag(kitti_to_rosbag),if kitti data is not such large.(less than 2500 pictures) But i want do "Visual Odometry / SLAM Evaluation 2012".So i download odometry data set sequence 00 which is "2011_10_03_drive_0027 (17.6 GB) Length: 4550 frames (07:35 minutes)" ,make it to rosbag( it is 25.8G by kitti2rosbag,37G!!!!!by kitti_to_rosbag). And i run it by Mathieu ' code (thanks to him again and again and agin)
roslaunch rtabmap_ros rtabmap.launch stereo:="true" left_image_topic:=/kitti/camera_color_left/image_raw right_image_topic:=/kitti/camera_color_right/image_raw left_camera_info_topic:=/kitti/camera_color_left/camera_info right_camera_info_topic:=/kitti/camera_color_right/camera_info rtabmap_args:="--delete_db_on_start" approx_sync:=true use_sim_time:=true frame_id:=base_link
it is normal in first 2000 pictures ,but when it comes to 2400.it just stocked! And my whole ubuntu system die ,sometime my mouse can move.But and keboard is useless.Even the numlock is useless! The light of numlock is not change ,if i press it .I try to wait ,but 3hours passed ,nothing changes . And ,i change some parameter of launch files like:
<!-- maximum features map size, default 2000 -->
<param name="OdomF2M/MaxSize" type="string" value="5000"/>
But it is useless too. And i use ORB2-slam as odom too.But both orb mode and rgbd_odom mode are useless.
----------------------------------------------------------sovled------------------------------------------------------------
new question :

----------------------------------------------------------sovled------------------------------------------------------------ -------------new questions:!!!
I try to export the poses and compare with kitti ground truth(4541 frames).I find the poses i exported from rtabmap are key frames(454 frames).But mostly every tools need same frame number,when they compare the ground truth.
So I try to change some settings :
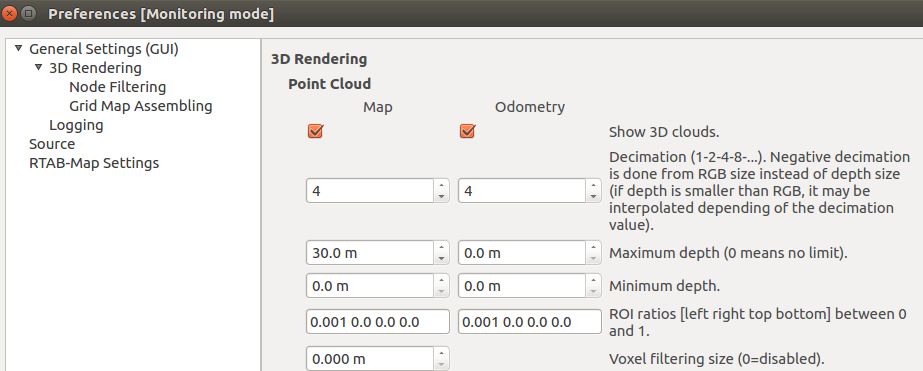
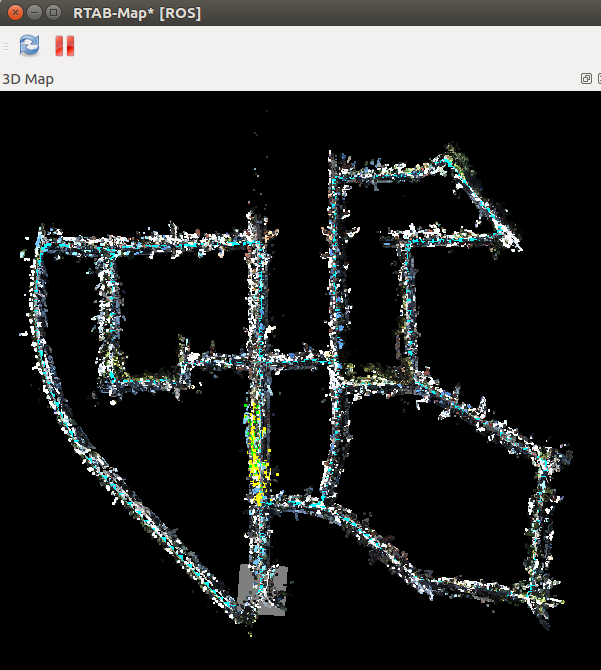
 First i set the rate in picture to 10,and run it .The whole ubuntu system stocked again.(I have changed set the ROI ratios to "0.001 0.0 0.0 0.0")And i try to another way: uncheck "Show 3D clouds map" .It worked in some kind of way .But it seems not be LoopClosure optimization or something.It looks bad and has a some breakpoints .I think maybe uncheck "show 3D clouds map" will close loopclosure optimization.
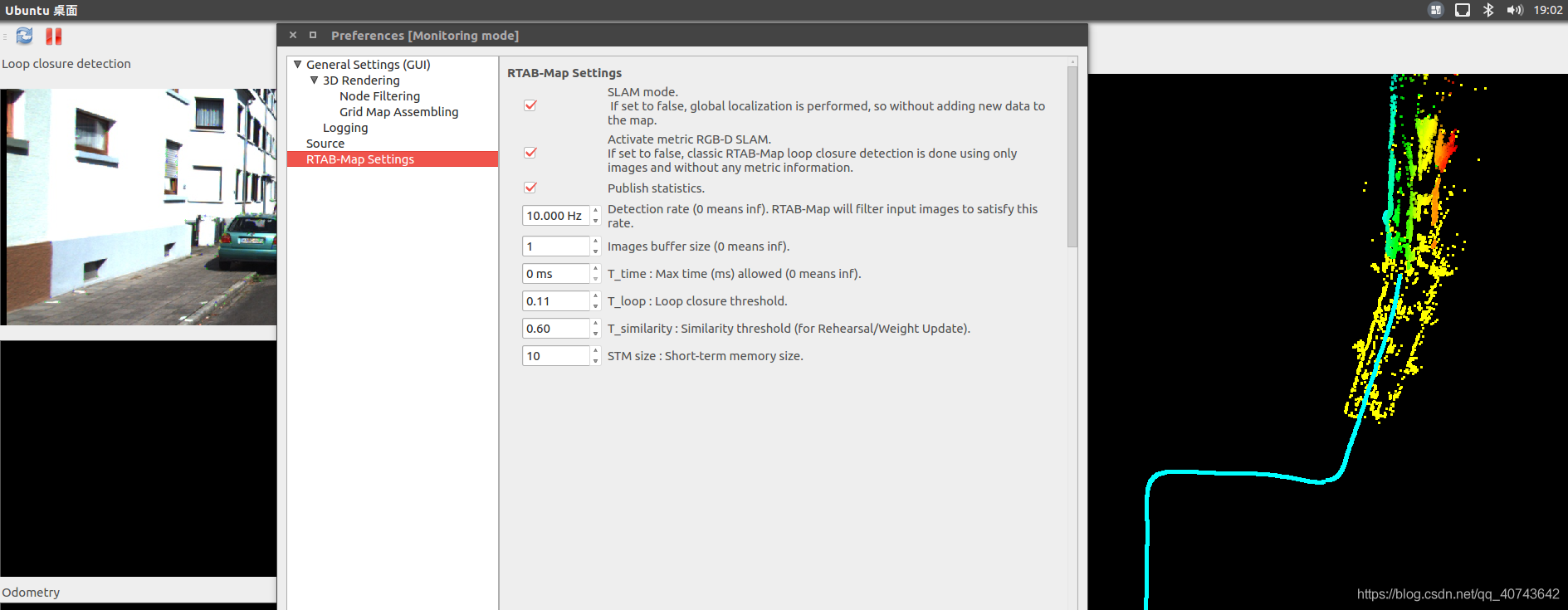
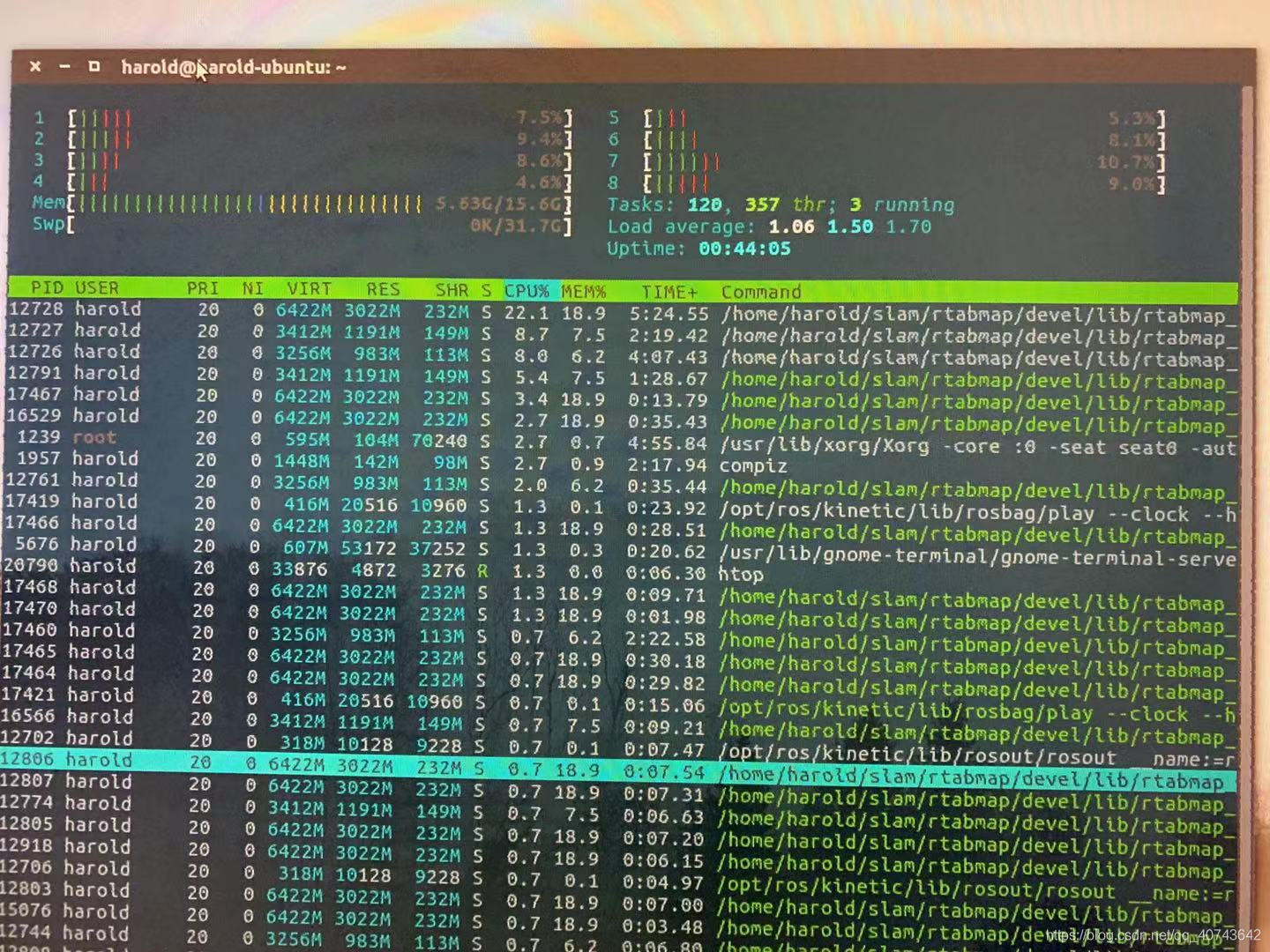
Next i try set the rate and buffer size in picutre to 0,and open the "Show 3D clouds map" and "Create intermediate nodes if odometry is faster than the detection rate.".In case the suddenly stock ,i use htop to watch the RAM .Guess what ?
picture below is the last picture of ubuntu .It stock when i remain 10G free ram! I cannot understand why?
First i set the rate in picture to 10,and run it .The whole ubuntu system stocked again.(I have changed set the ROI ratios to "0.001 0.0 0.0 0.0")And i try to another way: uncheck "Show 3D clouds map" .It worked in some kind of way .But it seems not be LoopClosure optimization or something.It looks bad and has a some breakpoints .I think maybe uncheck "show 3D clouds map" will close loopclosure optimization.
Next i try set the rate and buffer size in picutre to 0,and open the "Show 3D clouds map" and "Create intermediate nodes if odometry is faster than the detection rate.".In case the suddenly stock ,i use htop to watch the RAM .Guess what ?
picture below is the last picture of ubuntu .It stock when i remain 10G free ram! I cannot understand why?
 My teacher tells me ,it is unnecessary to make every frames because key frames,is it possible for rtabmap? If it can ,It is also unnecessary to know why system stocked.But if it cannot , i think i have to know how to avoid system stocked.
Any suggestion about it is OK !
Thanks!
My teacher tells me ,it is unnecessary to make every frames because key frames,is it possible for rtabmap? If it can ,It is also unnecessary to know why system stocked.But if it cannot , i think i have to know how to avoid system stocked.
Any suggestion about it is OK !
Thanks!