
Why does RTABmap subscribing to my other TF?

I have noticed some problem. When I launch RTABmap, it subscribes to my noisy_odom TF and also subscribes to filtered_odom TF and I think it makes my map being messy and sometimes I get this warning:
Rtabmap.cpp:2072::process() Rejected loop closure 1 -> 177: Not enough inliers 0/5 (matches=1) between 1 and 177
Which I guess means that RTABmap also does the visual odom which I do not want as it messes my map (even though I did not start that node).
So here is my RQT_GRAPH:
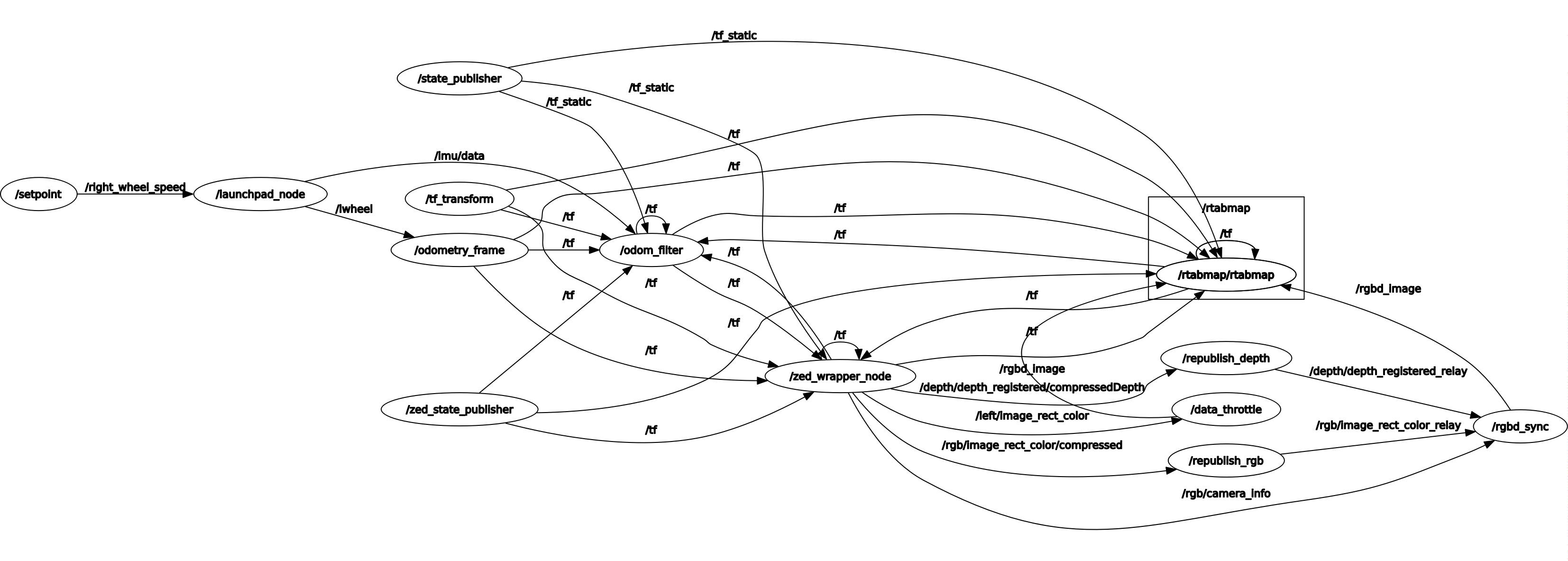
And in SVG format: https://drive.google.com/open?id=1yPJ...
My RTAB database if needed: https://drive.google.com/file/d/1WcAd...
And finally this is how I launch my RTABmap (note that on my remote robot I launch rtabmap/stere_sync and it sends rgbd_image topic):
<launch>
<arg name="use_zed" default="true" doc="Set to false when using Intel Realsense D435"/>
<arg name="localization" default="false" doc="Localization mode for navigation"/>
<arg name="database_path" default="rtabmap.db"/>
<arg name="rviz" default="true"/>
<arg name="rtabmapviz" default="true" />
<arg name="rate" default="1.0"/>
<arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg if="$(arg localization)" name="rtabmap_args" default=""/>
<arg unless="$(arg localization)" name="rtabmap_args" default="--delete_db_on_start"/>
<arg if="$(arg localization)" name="rviz_config" default="$(find rtabmap_ros)/config/navigation.rviz"/>
<arg unless="$(arg localization)" name="rviz_config" default="$(find rtabmap_ros)/config/mapping.rviz"/>
<arg name="input_odom" default="/odom"/>
<arg if="$(arg use_zed)" name="input_image" default="/stereo_camera/left/image_rect_color"/>
<arg if="$(arg use_zed)" name="input_depth" default="/stereo_camera/depth/depth_registered"/>
<arg if="$(arg use_zed)" name="input_camera_info" default="/stereo_camera/left/camera_info"/>
<arg name="rgb_topic" default="/rgb/image_rect_color" />
<arg name="depth_topic" default="/depth/depth_registered" />
<arg name="camera_info_topic" default="/rgb/camera_info" />
<arg name="rgbd_topic" default="/rgbd_image" />
<!-- Rtabmap params -->
<arg name="subscribe_rgbd" default="true"/>
<arg name="stereo" default="false"/>
<arg name="approx_sync" default="true"/>
<!-- rgbd_sync params -->
<arg name="compressed" default="true"/>
<arg name="rgb_image_transport" default="compressed"/>
<arg name="approx_rgbd_sync" default="true"/>
<arg name="rgbd_sync" default="true"/>
<!-- These arguments should not be modified directly, see referred topics without "_relay" suffix above -->
<arg if="$(arg compressed)" name="rgb_topic_relay" default="$(arg rgb_topic)_relay"/>
<arg unless="$(arg compressed)" name="rgb_topic_relay" default="$(arg rgb_topic)"/>
<arg if="$(arg compressed)" name="depth_topic_relay" default="$(arg depth_topic)_relay"/>
<arg unless="$(arg compressed)" name="depth_topic_relay" default="$(arg depth_topic)"/>
<arg if="$(arg rgbd_sync)" name="rgbd_topic_relay" default="$(arg rgbd_topic)"/>
<arg unless="$(arg rgbd_sync)" name="rgbd_topic_relay" default="$(arg rgbd_topic)_relay"/>
<!-- launch rgbd_sync -->
<node if="$(arg compressed)" name="republish_rgb" type="republish" pkg="image_transport" args="compressed in:=$(arg rgb_topic) raw out:=$(arg rgb_topic_relay)" />
<node if="$(arg compressed)" name="republish_depth" type="republish" pkg="image_transport" args="compressedDepth in:=$(arg depth_topic) raw out:=$(arg depth_topic_relay)" />
<node pkg="nodelet" type="nodelet" name="rgbd_sync" args="standalone rtabmap_ros/rgbd_sync" output="screen">
<remap from="rgb/image" to="$(arg rgb_topic_relay)"/>
<remap from="depth/image" to="$(arg depth_topic_relay)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="rgbd_image" to="$(arg rgbd_topic_relay)"/>
<param name="approx_sync" type="bool" value="$(arg approx_rgbd_sync)"/>
<param name="queue_size" type="int" value="100"/>
<param name="depth_scale" type="double" value="1 ...add a comment

