
nav2d Operator does not update with laser scan on real Clearpath Husky
Hy there,
i am trying to use the nav2d package with a real Husky but have problems with getting the costmap updated according to a lidar-measurement. The setup looks like: PC running ROS Kinetic connected over SSH to Husky. The Joystick is connected to the PC and the nav2d Operator runs on the PC. The husky is able to be moved, but he does just turn in the circle of the dark space of the map. All parameters are set to default, eccept the laser_frame is set to front_laser.
The following rqt_graph shows that the operator node successfully connects to the topic /scan/front which is correctly echoing data.

The result is the following in rviz:
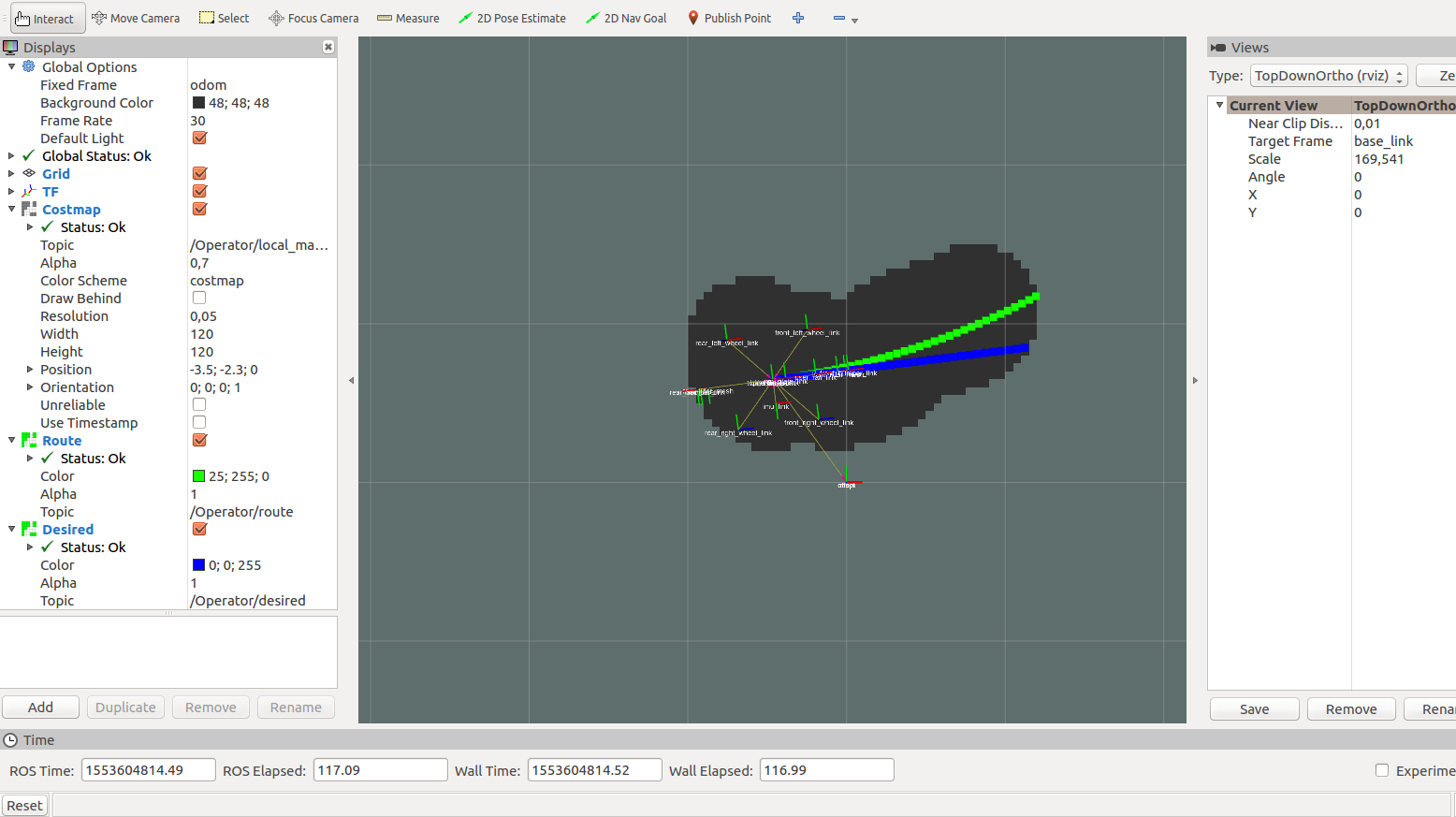 So no costmap updated according to the laser scan at all.
So no costmap updated according to the laser scan at all.
The operator node outputs following to the terminal:
[ INFO] [1553676062.818859498]: Using plugin "obstacle_layer"
[ INFO] [1553676063.385903322]: Subscribed to Topics: scan
[ INFO] [1553676067.066342765]: Using plugin "inflation_layer"
[ WARN] [1553676072.713066832]: The scan observation buffer has not been updated for 7.25 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676072.913141790]: The scan observation buffer has not been updated for 7.45 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676073.112945804]: The scan observation buffer has not been updated for 7.65 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676073.312964877]: The scan observation buffer has not been updated for 7.85 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676073.513063737]: The scan observation buffer has not been updated for 8.05 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676073.712961420]: The scan observation buffer has not been updated for 8.25 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676073.913113372]: The scan observation buffer has not been updated for 8.45 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676074.113024278]: The scan observation buffer has not been updated for 8.65 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676074.313027468]: The scan observation buffer has not been updated for 8.85 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676074.512953558]: The scan observation buffer has not been updated for 9.05 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676074.713007869]: The scan observation buffer has not been updated for 9.25 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676074.913051751]: The scan observation buffer has not been updated for 9.45 seconds, and it should be updated every 0.40 seconds.
[ INFO] [1553676074.929597794]: Will publish desired direction on 'route' and control direction on 'desired'.
[ WARN] [1553676075.113030975]: The scan observation buffer has not been updated for 9.65 seconds, and it should be updated every 0.40 seconds.
[ WARN] [1553676075.313082459]: The scan observation buffer has not been updated for 9.85 seconds, and it should be updated ...
