
costmap_2d plugin
Hello. I am a ROS beginner. I am doing SLAM of turtlebot 3 (waffle) in the ubuntu 16.04, ros (kinetic) personal computer environment. I modified local_costmap_params.yaml to use the costmap _ 2 d plugin (Inflation Layer). After the change, it became as follows.
local_costmap: global_frame: /odom robot_base_frame: /base_footprint
update_frequency: 10.0 publish_frequency: 10.0 transform_tolerance: 0.5
static_map: false rolling_window: true width: 3 height: 3 resolution: 0.05 plugins: - {name: inflation_layer, type: "costmap_2d::InflationLayer"}
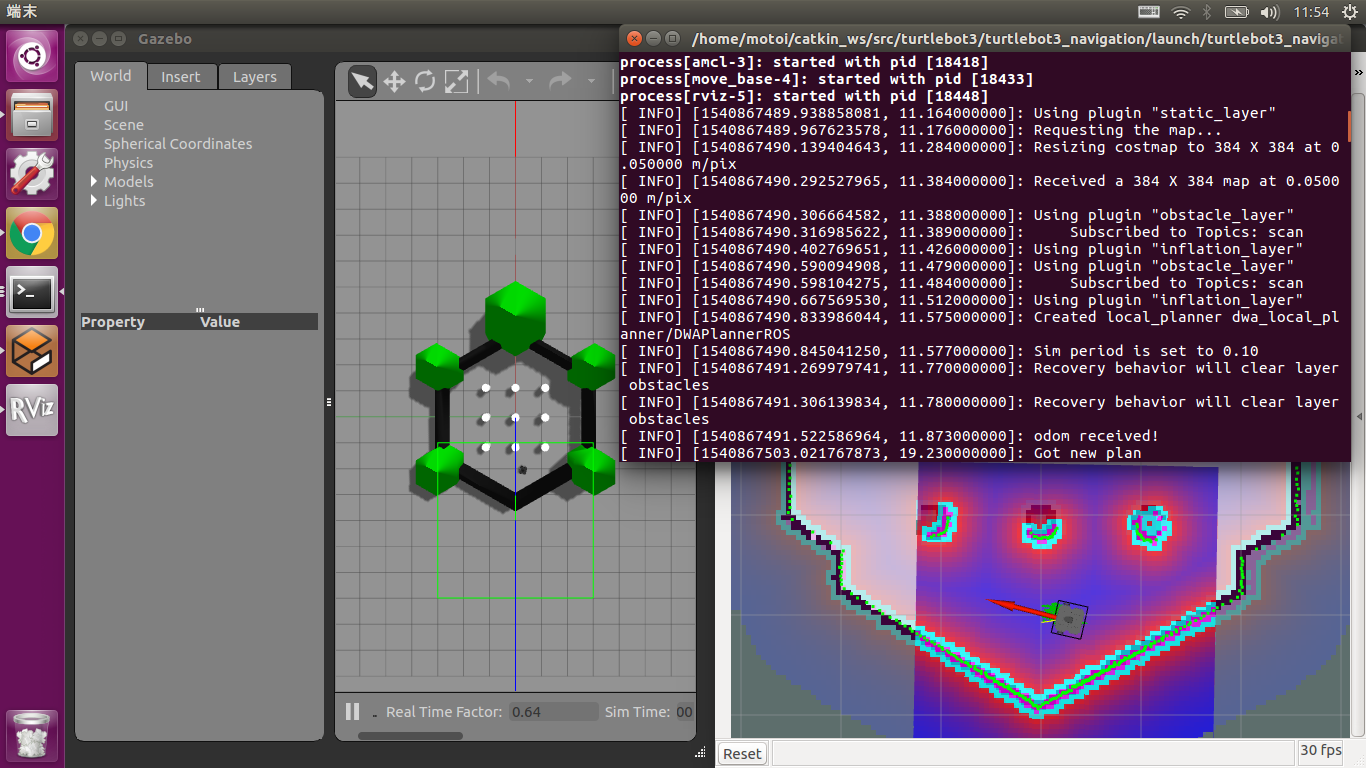
However, after starting gazebo normally,
$ export TURTLEBOT3_MODEL=waffle $roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
When you do this,
Warning: Invalid argument "/map" passed to canTransform argument target_frame in tf2 frame_ids cannot start with a '/' like: at line 134 in /tmp/binarydeb/ros-kinetic-tf2-0.5.18/src/buffer_core.cpp
The error will come out in succession. Could I ask the reason? I feel that I am doing some fundamental mistake. Thank you.!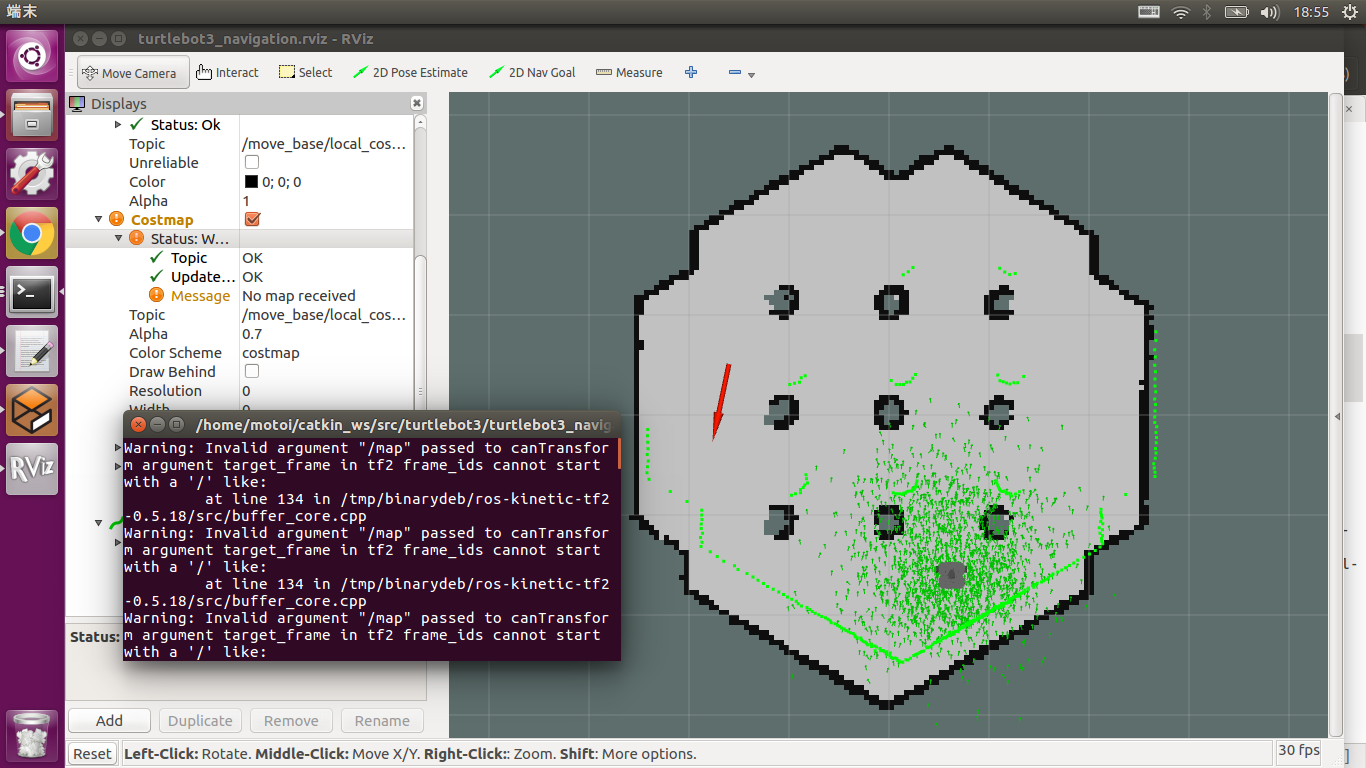


Do you have a costmap_common_params.yaml file? If yes please update your answers with it.
thank you.I have a costmap_common_params_waffle.yaml .this is OK?