
How to I set a robot pose in stage

Hi
is it possible to set the pose [x,y, alpha] of the simulated robot in stage via ROS?
Greetings
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
Hi
is it possible to set the pose [x,y, alpha] of the simulated robot in stage via ROS?
Greetings
Are you talking about setting the initial position? You can set this by modifying your .world file. Example:
roomba( pose [ 3.2 8 0 0 ] name "roomba_0" color "red")
where roomba is the name of the model of my robot. The first argument of pose is the x position, the second is y position, third z position and the last is the orientation of the robot.
Another way to set the robot's position is to click on it and drag to the desired position.
Hello Lucas I would like to set the robots pose while the simulator is running.
If you want to set the robot's position while the simulator is running, you can click on the robot and drag it to the position that you want.
Hello and thanks for your comments. But I like to set and change the pose of the robot while the simulation is running. I have to run tests and I do not want to place the robot always with the mouse. Greetings and thanks again
Hello,did you find a solution to this? can you share it? thanks
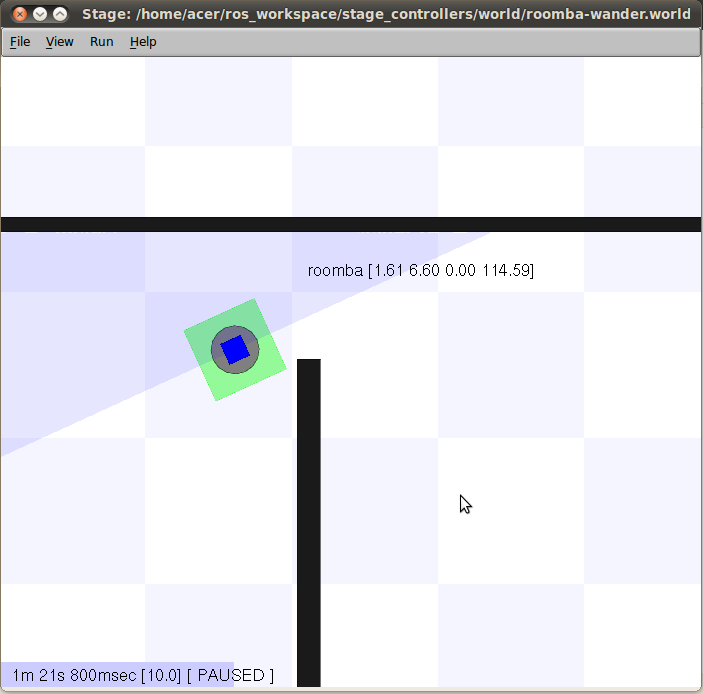
In agreement with lucascoelho, I cite an example. If you check out this tutorial, http://www.ros.org/wiki/stage/Tutorials/IntroductiontoStageControllers and have a look at the roomba-wander.world file, then
pose [ -8 6 0 0 ]
is the pose [x y z alpha] that you are looking for; x = -8, y = 6, z = 0 and alpha = 0.
Once the simulation has started, you can see the realtime pose, by clicking on the robot.
Hello Arkapravo, I would like to set the robots pose while the simulator is running. Any ideas?
Asked: 2012-03-12 04:34:05 -0500
Seen: 2,631 times
Last updated: Mar 12 '12
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.


I would like to set the robots pose while the simulator is running. Any ideas?
@Markus Bader Have a look, http://answers.ros.org/question/12384/change-simulator-stage-model-configurations-in