Path Planning Dynamical Reconfiguration
Hi all, This is my first question so first of all nice to meet you and thank you in advance for any help you can give me
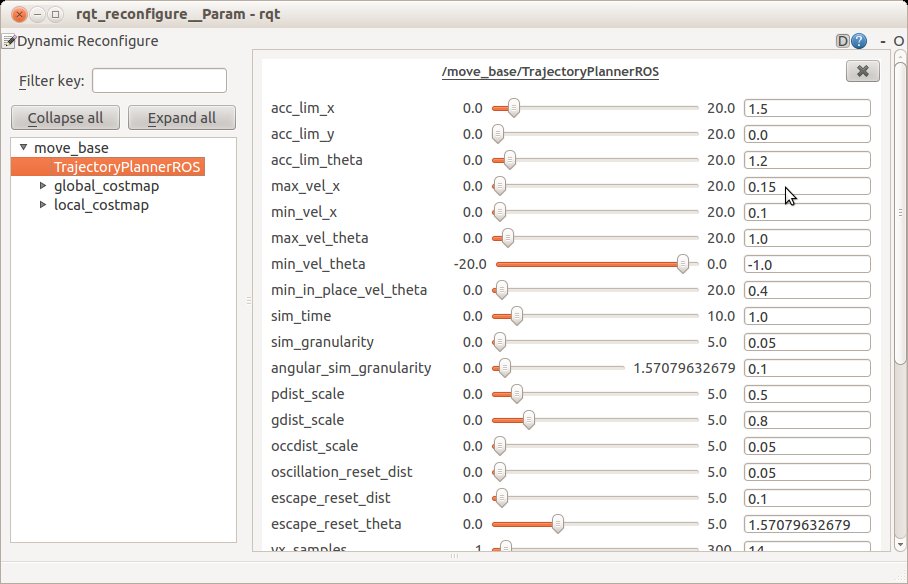
That's my problem: I am using the navigation stack and what I would like to do is to reconfigure the speed of the robot at runtime. I don't know how to tackle the problem. I found that there is something like dynamical reconfiguration node but I didn't really understand it.
A related question is: when I setup the speed at runtime I should also resend a goal to the robot or the new speed is "automatically" updated ?
Just a detail, I am using ROS Kinetic kame.
Thank you very much for reading my question.
Regards, Francesco
add a comment