
Slam TF problem
Hello everybody,
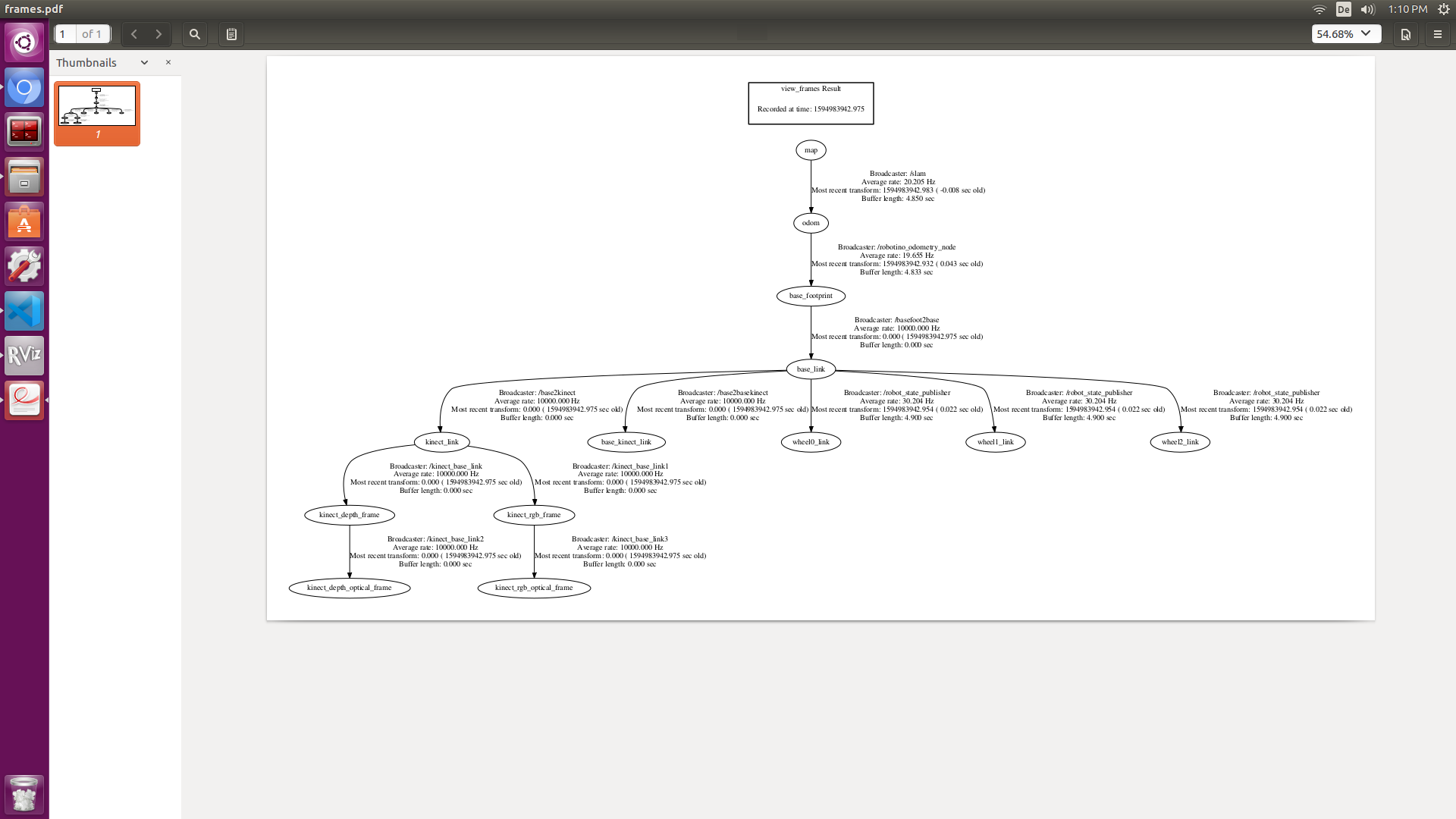
i have a omniwheel robot, which has mounted a microsoft kinect. With this configuration i use a Pointcloud_to_laserscan node to generate my laserscaner and also i use robot pose ekf to improve my odometry with the gyrosensor and odometry. For the robot pose ekf node i add a base_footprint frame. When i am using gmapping I get the following "warning":
[ WARN] [1594983943.493151010]: MessageFilter [target=odom ]: Dropped 100.00% of messages so far. Please turn the [ros.gmapping.message_notifier] rosconsole logger to DEBUG for more information.
[ WARN] [1594983943.493301588]: MessageFilter [target=odom ]: The majority of dropped messages were due to messages growing older than the TF cache time. The last message's timestamp was: 1594983923.628037, and the last frame_id was: base_kinect_link
I think the gmapping node has some transformation problem, why it cant create a map.
I hope you can help me.
Regards, Markus

How did you setup the frames in the gmapping launch file?
The frames setup is: odom_frame = odom | base_frame = base_link | map_frame = map
I think I used the wrong base_frame. I used the base_footprint and it works better, but i get sometimes the same error
Try to change the transform_tolerance in the pointcloud_to_laserscan launcher. What is the target frame that you used there?
I used on my pointcloud to laserscan the base_kinect_link, which is 0.1 m above over the base_link How high would you recommend the transform tolerance
Using the values that you can get from
tf_echobetween the frames, try to set different values for the tolerance and see the resultSo i found my mistake, it was really the problem about to set the right franes. So it works fine! Thank you