
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi there Francesco,
yes indeed, dynamical reconfiguration means that you can change some parameters for move_base.
When you run your code, try running (in another terminal, with your workspace sourced):
rosrun rqt_reconfigure rqt_reconfigure
And you'll see a window like this:
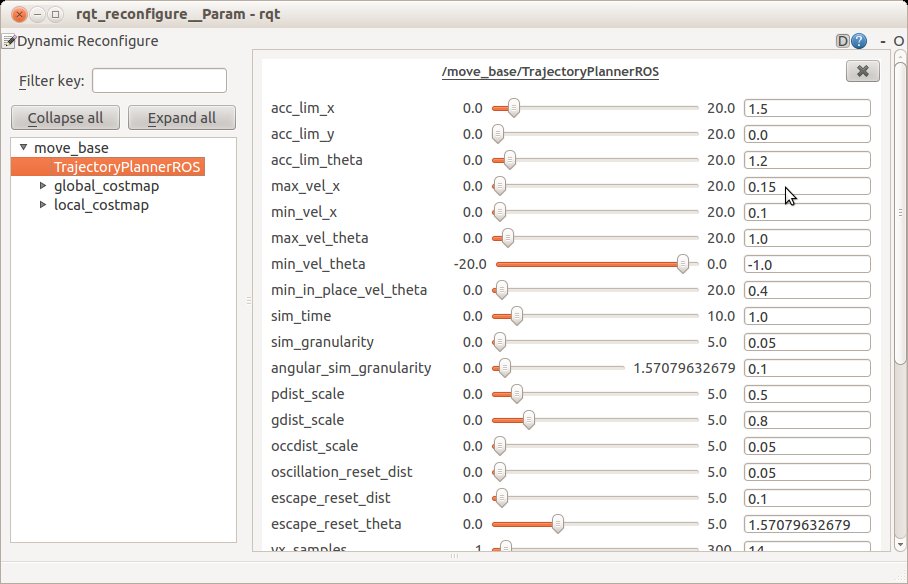
There you can modify some parameters like maximum speed, acceleration and others, that those values will be updated automatically, meaning that if you increase the maximum velocity, you'll see your robot moving faster as you plan.
I hope that helps!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
