
Architecture using `ur_modern_driver`
I'm building an architecture for my application and I'd like to know if the functionality represented in the ur_modern_driver part (image below) is correct. This is follow-up of action-completion.
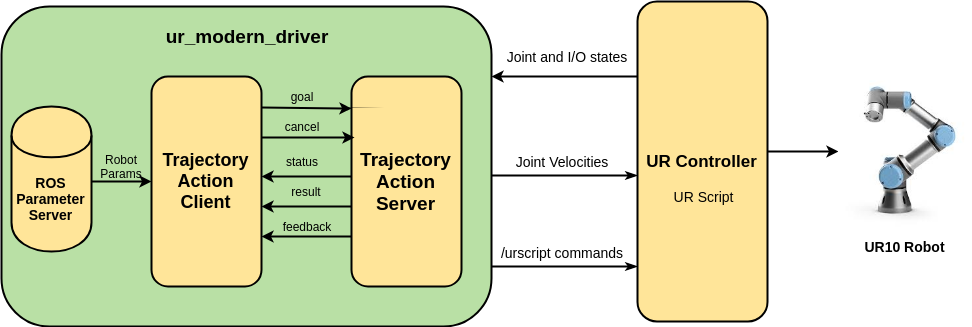
I've put Joint velocities as by-default the driver publishes speedj commands.
Many thanks to @gvdhoorn and Thomas Timm in advance!
add a comment
