
Ground truth to show robot movement in Rviz
Hello all,
I'm trying to figure out what is need and the information path so that information the robot shown in Rviz moves relative to a fixed frame. (as opposed to the robot standing still and the world moving around it).
The practical case is that I am using px4's sitl tools to simulate an UAV. It opens fine if I use the UAV's base_link as a fixed frame. When the UAV moves, it only moves in Gazebo, in Rviz is the world around it that moves. It looks like I am missing the transformation between world and base_link. But I don't understand who to do it. I read about fixed frames in the tutorials and I saw a lot of code using the librotors_gazebo_odometry_plugin I also saw that the /uav1/mavros/local_position/odom topic is publishing the NaviationMessage Odometry with the values I want. But since there is no world frame anywhere (I'm assuming it is a special frame loaded with world) I don't understand what stuff to route to where.
I am launching joint_state_publisher, robot_state_publisher and rviz all from the same robot_description.
Urdf file Here is my tf tree (had to cut it in half and remove arms and most rotors otherwise was too big)
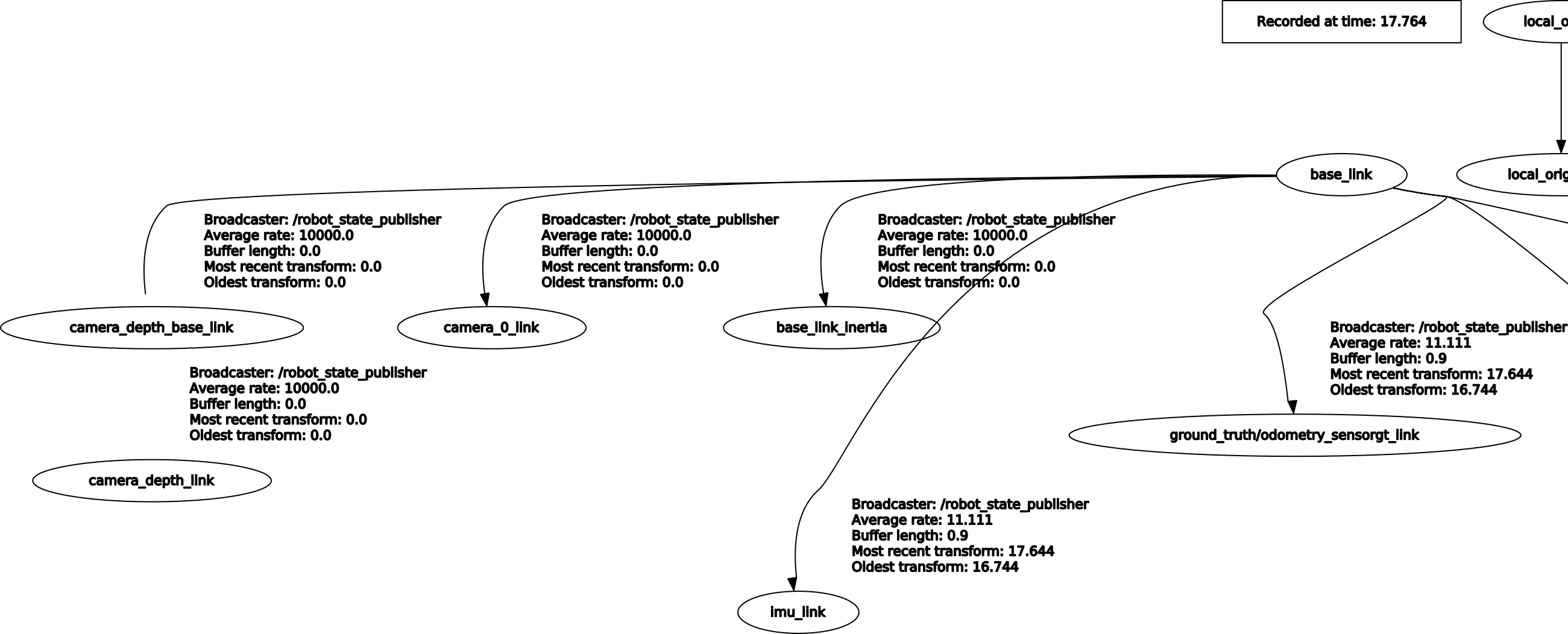
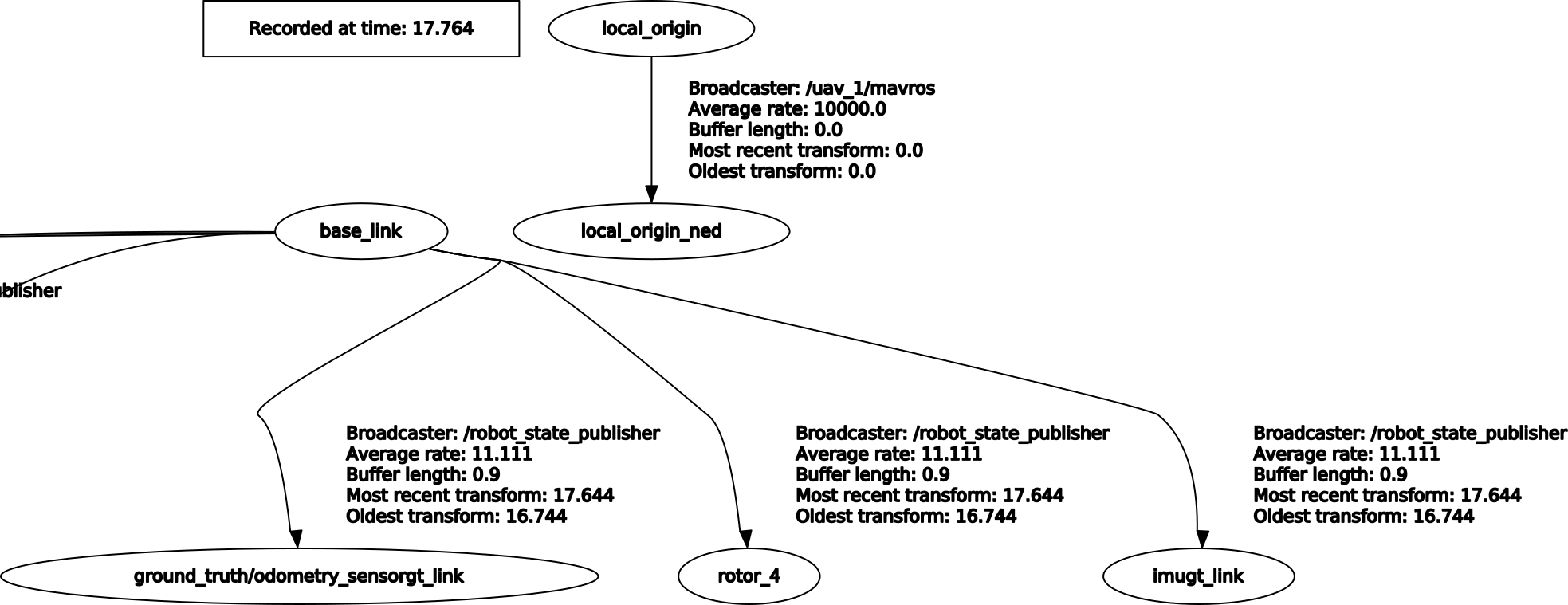

{kind=link}
What is your question?