
robot_localization nan output when using ODOM x,y in differential mode [closed]
Hello Everyone!
As I am trying to solve my previous question i have encountered another problem when trying to run robot_localization.
Brief background:
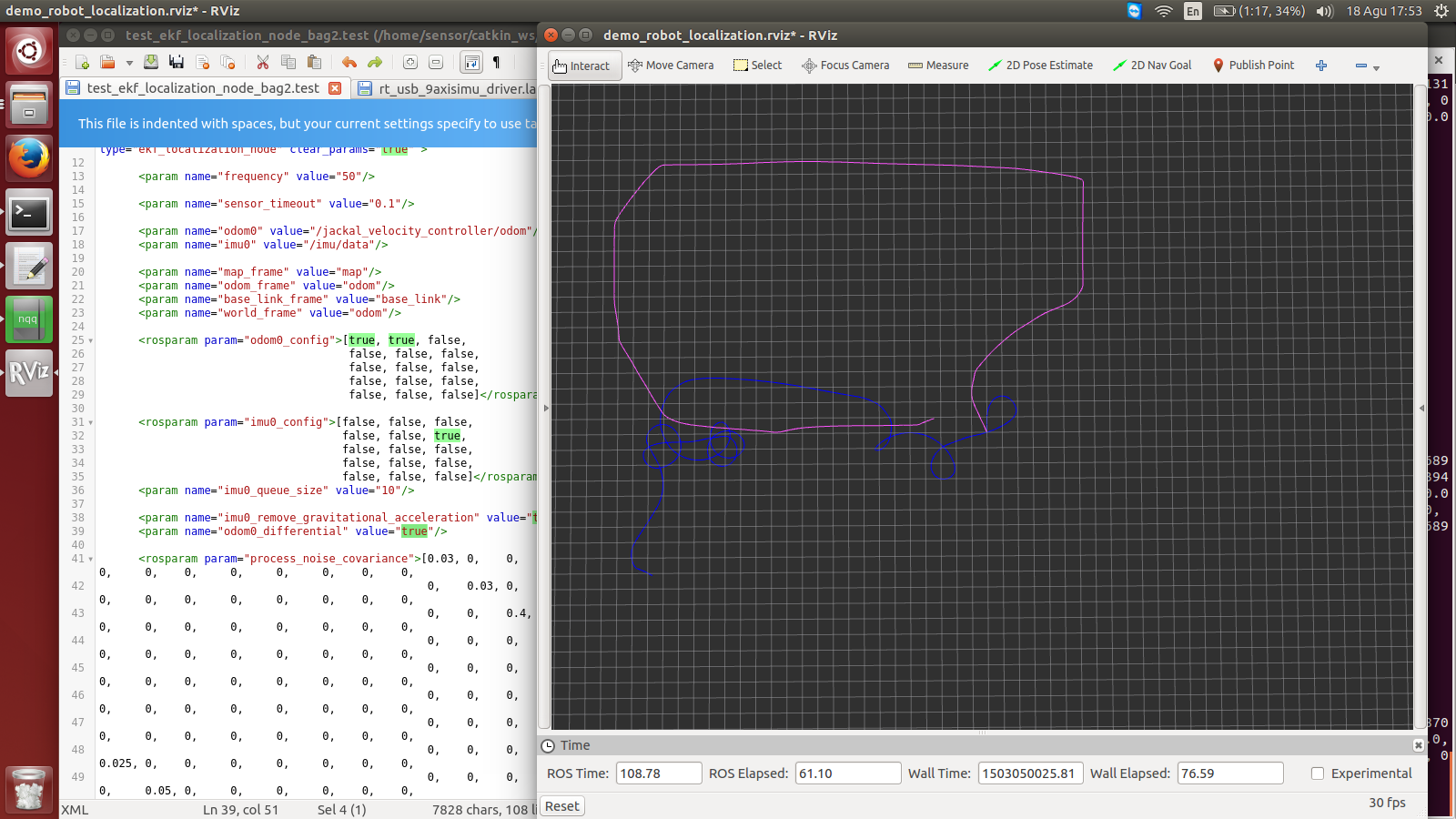
base on my experiments in which data to fuse from ODOM and IMU on robot_localization i did modify the test_ekf_localization_node_bag2.test with this configuration:
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<rosparam param="imu0_config">[false, false, false,
false, false, true,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<param name="odom0_queue_size" value="10"/>
<param name="imu0_queue_size" value="10"/>
<param name="imu0_remove_gravitational_acceleration" value="false"/>
<param name="odom0_differential" value="true"/>
<param name="imu0_differential" value="false"/>
output i got is something like this:
Problem: Making the same pattern as the test2.bag, My configuration is as follows
ODOM Source: iRobotcreate2 using autonomy_create driver publishing odom->base_link at 50Hz, frame_id = odom child_frame_id = base_link
IMU Source: LPMS USBAL2 using lpms_imu from larics publishing /imu_data topic at 50Hz, frame_id = base_link
<node name="robot_localization" pkg="robot_localization" type="ekf_localization_node" clear_params="true" output="screen" >
<param name="frequency" value="50"/>
<param name="sensor_timeout" value="0.1"/>
<param name="odom0" value="/odom"/>
<param name="imu0" value="/imu_data"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="two_d_mod" value="true"/>
<param name="publish_tf" value="false"/>
<rosparam param="odom0_config">[true, true, false,
false, false, false,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<rosparam param="imu0_config">[false, false, false,
false, false, true,
false, false, false,
false, false, false,
false, false, false]</rosparam>
<param name="odom0_queue_size" value="10"/>
<param name="imu0_queue_size" value="10"/>
<param name="imu0_remove_gravitational_acceleration" value="false"/>
<param name="odom0_differential" value="true"/>
<param name="imu0_differential" value="false"/>
<rosparam param="process_noise_covariance">[0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.4, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.06, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.025, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.025, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.05, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.002, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.002, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.004, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0 ...
I'm currrently battling the same NaN issue, with a different configuration. Can you update your ticket to include a sample IMU and odom message? I'm starting to think my covariences on them are bad and causing the instability. What are yours like?
Hi, my bagfile is upload here.
Please post sample IMU and odometry messages with the question.
I have no trouble running using your bag file and the launch file you posted. What version are you using? Also, you misspelled
two_d_modein your launch file.