
How to add odometry into hector slam?
Hi, we are using hector slam for builiding 2D map with rpliar laser. To solve the problem that false mapping in environmets similiar to long corridor, we want to add odometry into hector slam.
We read the source code of hector_mapping. We think that we can achieve our goal by setting the parameter "p_use_tf_pose_start_estimate_" to be true.
In this way, the mapping process uses the odometry information stored in tf tree. The parameter "p_use_tf_pose_start_estimated_" may not be set to be true in the beginning. When the robot is going to walk througth a corridor, "p_use_tf_pose_start_estimated_" is set to be true.
However, in our tests, whenever the "p_use_tf_pose_start_estimate_" is set to be true, it always output following error
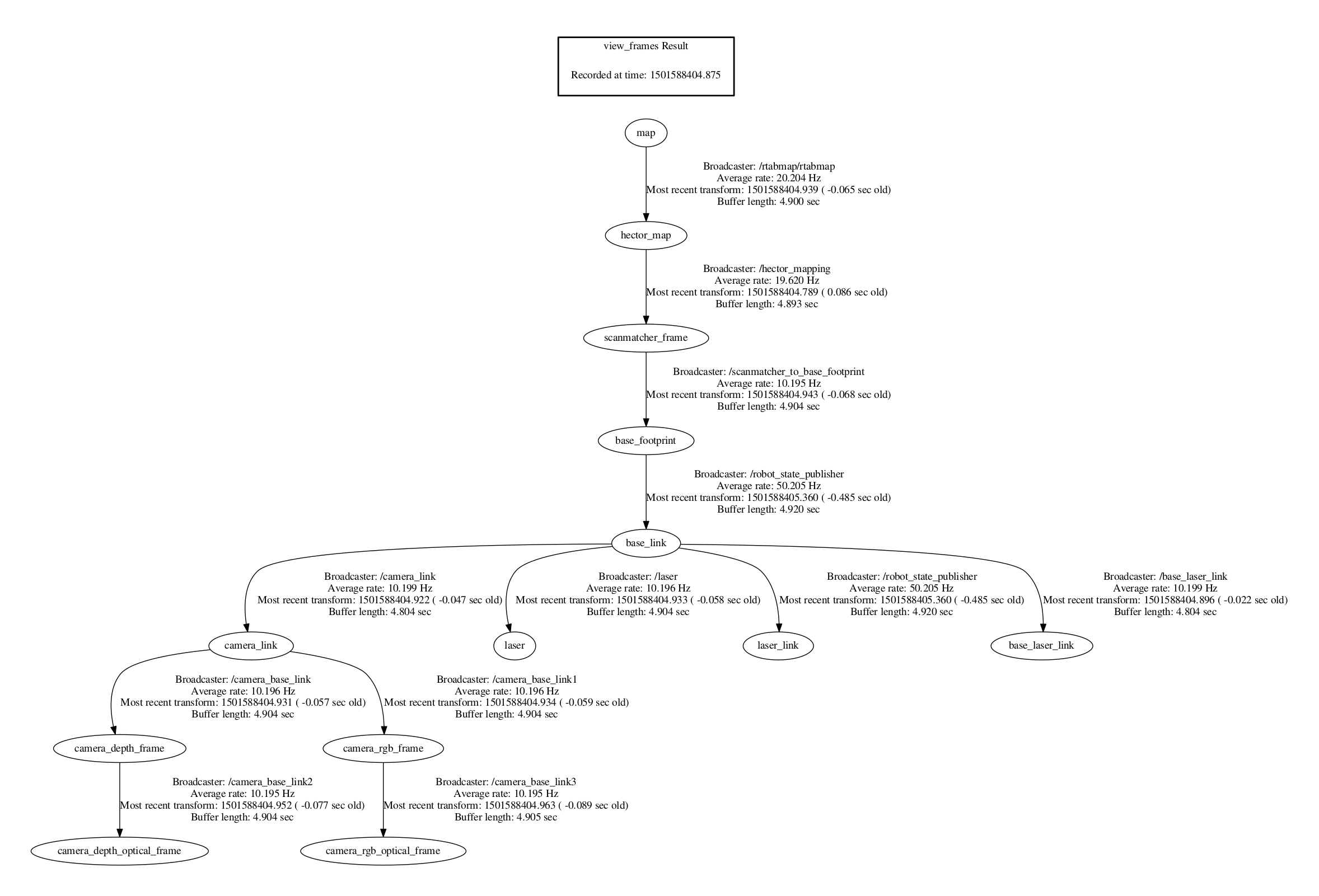
[ERROR] [1501720267.512793847]: Transform from map to base_link failed with Lookup would require extrapolation into the future. Requested time 84.940000000 but the latest data is at time 84.740000000, when looking up transform from frame [base_link] to frame [map]
So solve this error, we launched move_base as this link suggests. But it didn't work.
So we have two questions
1, How to solve above error? Why is it difficult for reading transforms from tf tree in hector slam?
2, What are other ways for adding odometry information into hector slam?
Looking for any valuable advices! Many thanks! Best Regards!


who is providing the base_link -> map transform? if it is AMCL, can you post the launch/config file, please?
It is an online mapping and navigation, so we don't use AMCL. Hector slam provides the base_link-> map transform. Thanks!