
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi !
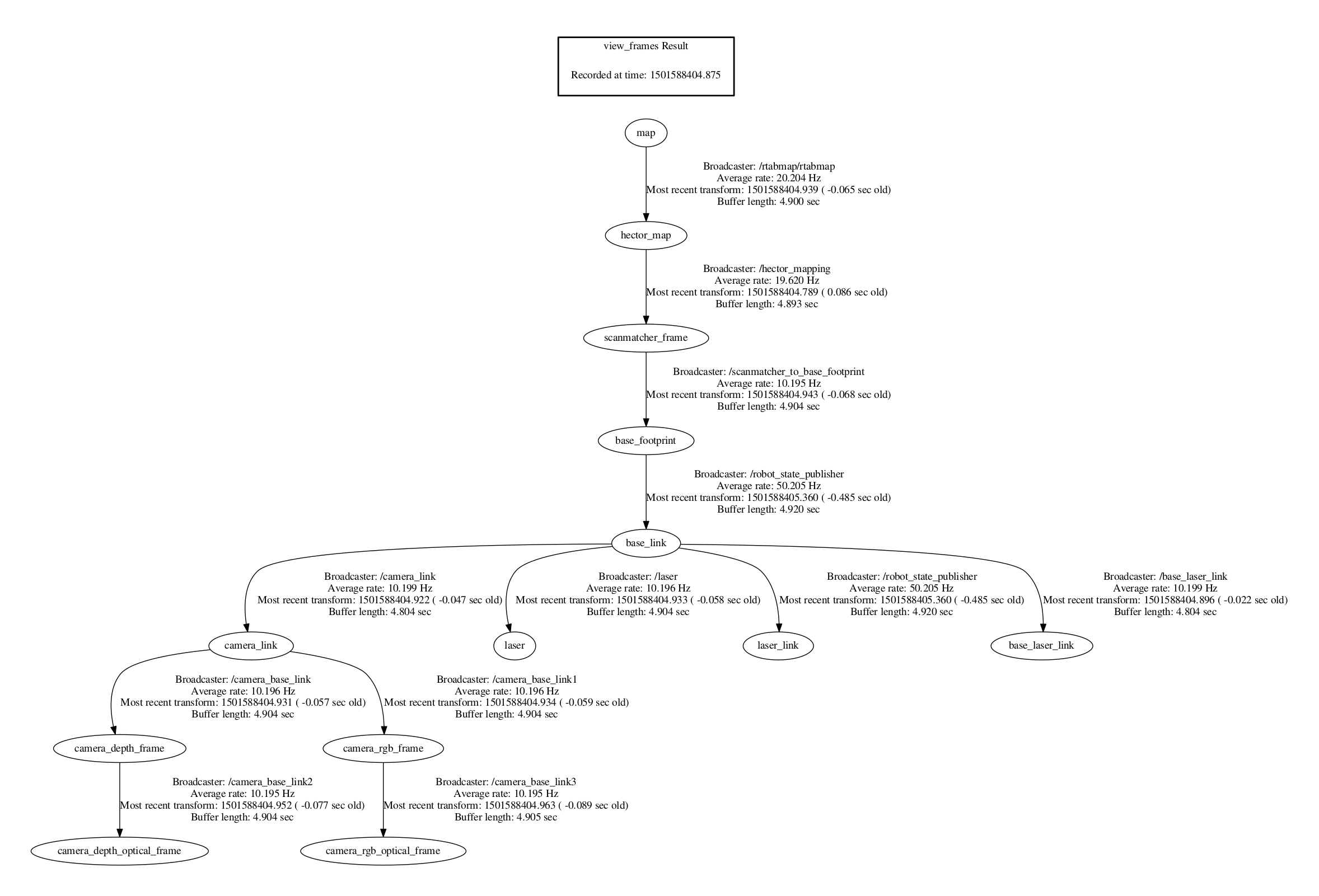
I'm not sure this can help but I'm using RTABMap to build a map and for that, I have to launch hector_map thanks to this modified launch file, so that hector_mapping provides the odometry needed by RTABMap, and my first test indicated it was working (odometry showed nicely in RVIZ, and behaved as expected).
During the test, I got the following tf tree thanks to view_frames:
Here is the command line RTABMap log, which includes hector_mapping messages.
Hope this helped you !
| | 2 | No.2 Revision |
Hi !
I'm not sure this can help but I'm using RTABMap to build a map and for that, I have to launch hector_map hector_mapping thanks to this modified launch file, so that hector_mapping provides the odometry odometry needed by RTABMap, and my first test indicated it was working (odometry showed nicely in RVIZ, and behaved as expected).
During the test, I got the following tf tree thanks to view_frames:
view_frames
Here is the command line RTABMap log, which includes hector_mapping messages.
Hope this helped you !
| | 3 | No.3 Revision |
Hi !
I'm not sure this can help but I'm using RTABMap to build a map and for in order to do that, I have to launch hector_mapping thanks to this modified launch file, so that hector_mapping provides the odometry needed by RTABMap, and my first test indicated it was working (odometry showed nicely in RVIZ, and behaved as expected).
During the test, I got the following tf tree thanks to
view_frames
Here is the command line RTABMap log, which includes hector_mapping messages.
Hope this helped you !
| | 4 | No.4 Revision |
Hi !
I'm not sure this can help but I'm using RTABMap to build a map and in order to do that, I have to launch hector_mapping thanks to this modified launch file, so that hector_mapping provides the odometry needed by RTABMap, and my first test indicated it was working (odometry showed nicely in RVIZ, and behaved as expected).
During the test, I got the following tf tree thanks to
view_frames
Here is the command line RTABMap log, which includes hector_mapping messages.
The rtabmap tutorial I used to set this up is here if you want to check the source of the launch file.
Hope this helped you !
| | 5 | No.5 Revision |
Hi !
I'm not sure this can help but I'm using RTABMap to build a map and in order to do that, I have to launch hector_mapping thanks to this modified launch file, so that hector_mapping provides the odometry needed by RTABMap, and my first test indicated it was working (odometry showed nicely in RVIZ, and behaved as expected).
During the test, I got the following tf tree thanks to
view_frames
Here is the command line RTABMap log, which includes hector_mapping messages.
The rtabmap tutorial I used to set this up is here if you want to check the source of the launch file.
The use of hector_mapping to generate odometry in order to obtain a map thanks to RTABMap is also discussed here and here on RTABMap dedicated forum.
Hope this helped you !
| | 6 | No.6 Revision |
Hi !
I'm not sure this can help but I'm using RTABMap to build a map and in order to do that, I have to launch hector_mapping thanks to this modified launch file, so that hector_mapping provides the odometry needed by RTABMap, and my first test indicated it was working (odometry showed nicely in RVIZ, and behaved as expected).
During the test, I got the following tf tree thanks to
view_frames
Here is the command line RTABMap log, which includes hector_mapping messages.
The rtabmap tutorial I used to set this up is here if you want to check the source of the launch file.
The use of hector_mapping to generate odometry in order to obtain a map thanks to RTABMap is also discussed here and here on RTABMap dedicated forum.forum (posts on how to adapt the launch file).
Hope this helped you !
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
