
robot_pose_ekf and its coordinate system
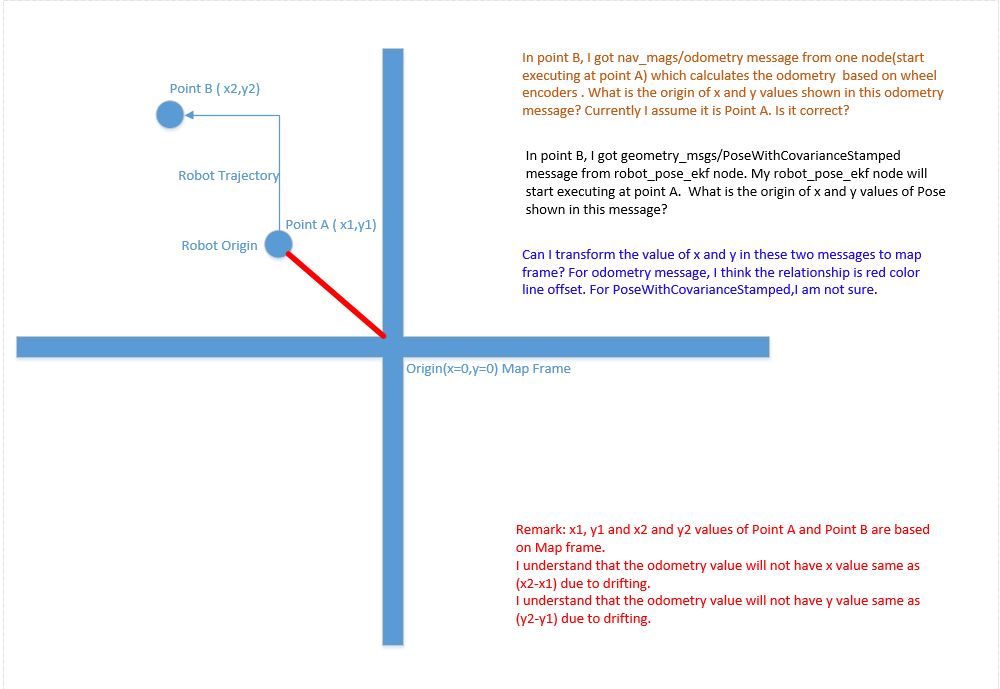
Hi all, I have a few questions about odometry message and output from robot_pose_ekf relationship to their coordinate system. Please refer to image below.
Thanks in advance for your advice.


Next time: The text in the image is a bit hard to read, so please separate text from image.