AMCL - Determining an obstacle from forbidden zone on map
Hello,
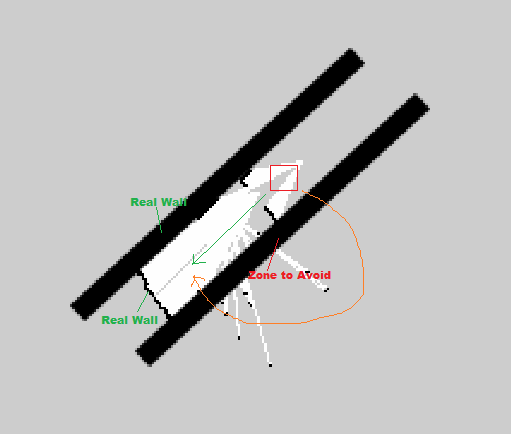
I have a robot which needs to navigate through a gap by using a map which I created using gmapping + manual editing using Photoshop. As you can see in the map below, there are black lines representing real walls on the map (the right line, opposite line and the gap lines). On the left there is open space however I want the robot to always go through the gap in a straight line and avoid making plans to go on the left zone to reach it goal (not turning around the gap).
Problem:
In order to attempt to resolve this I have manually marked the left zone in a black line but now I am worried that AMCL might think the robot is not localizaed well because it "mistakes" it for another wall. I noticed that when the robot faces the left side it goes into unable to determine pose mode. Am I doing the wrong approach here? Is there a better way to mark a forbidden zone different from real obstacles on a small map?