
Laser scan data not aligned with map data and real world (Navigation Stack)
Good Morning,
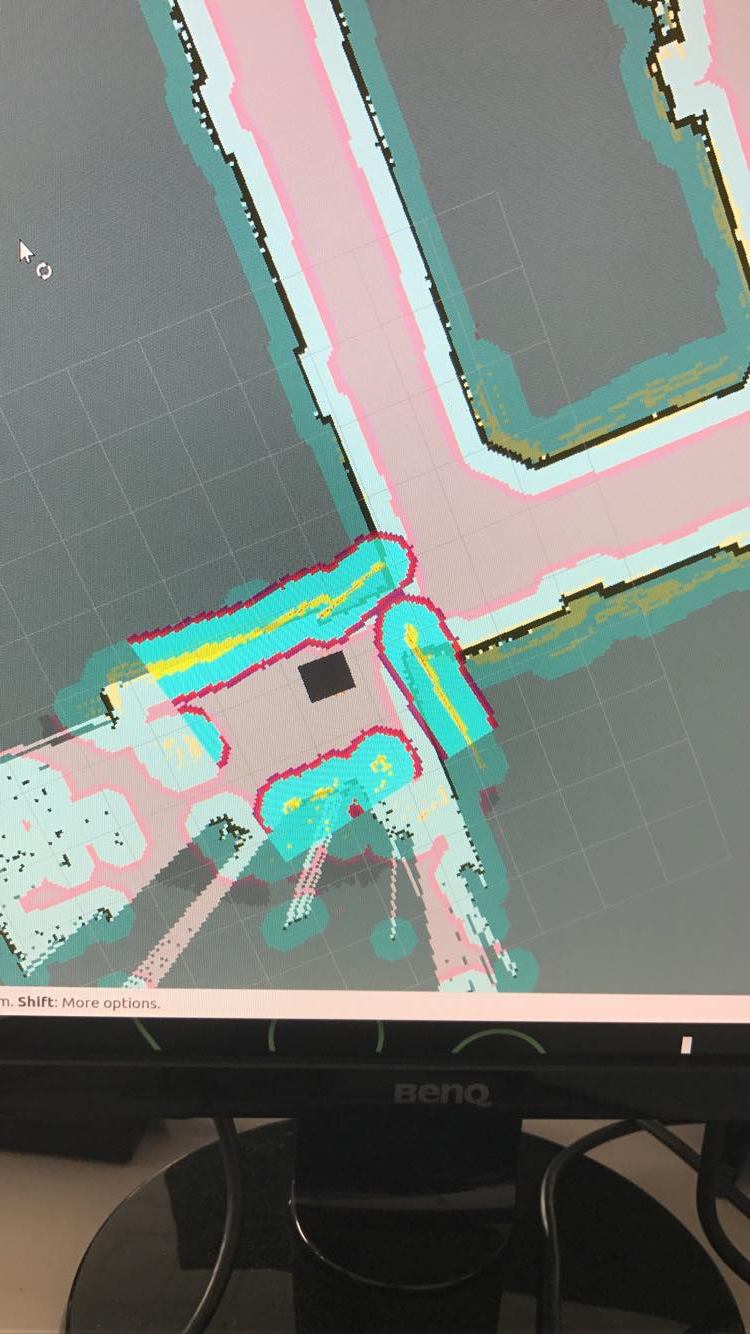
I am facing a problem recently with navigation. Once navigating, the laser scan inflation is not aligned with the walls included in the map. It happens at every corner in the map, it starts detecting the corner from the laser scanner before it actually reach it in reality which fail all the navigation.
The strange thing is that i have been navigating with this robot for around 6 months and every thing was working really fine, but this problem suddenly appeared recently without changing the navigation software. Any suggestion what could the problem be? is it odometry or laser scanner?
If someone had such a problem before and fixed it, it would be great to help.
Thanks a lot,
add a comment

