I gave a fully physical version of this a try in my bullet physics wrapper ( https://github.com/lucasw/simple_sim_ros as opposed to Gazebo) and got okay results:
https://www.youtube.com/watch?v=lYB8z...
Obstacles much higher than the one shown in the video resulted in a lot of slipping when the back wheels reached it.
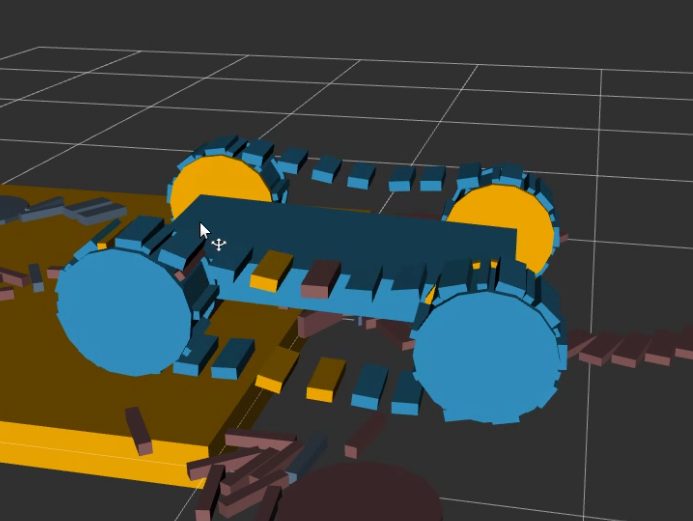
The tracks are driven like a gear with teeth meshing with the gaps between track plates, and inner and outer wheel covers with a slightly larger diameter than the inner wheel keeps the tracks from falling off. Some cheating may be going on if the wheel covers or teeth are contacting the ground rather than than just the treads.
The whole thing shakes around a bit which may be a precursor to sim instability in rougher environments or with a different configuration.
It took around 20% cpu on a 2.8GHz i7, given that and additional mechanisms that ought to be added that would take up more cpu (like maybe a packbot style second set of treads on flippers, or a higher density of plates) it may not be worth it unless simulating tracks is important.



