
puzzles about link inertia in urdf exported by sw2urdf
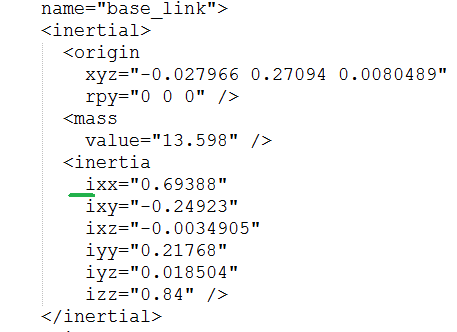
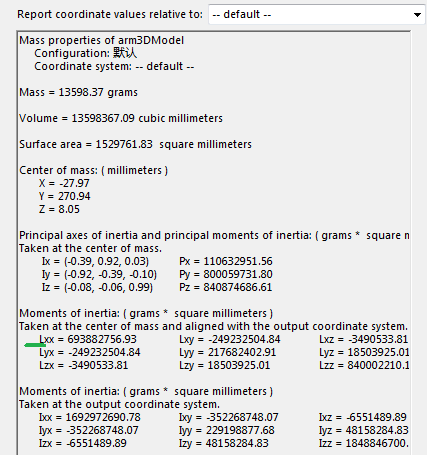
Hello, I have a six_dof arm 3D model and have exported urdf by using sw2urdf. The link mass and inertia are auto-generated by the sw2urdf plugin. But now I find that all link's mass and inertia are same in urdf file, so I want to fill these values manually. I can see every link's mass and inertia in solidworks but I don't know the urdf ixx value should fill with Ixx value or Lxx value that show in solidworks? The following pictures show one link inertia in the urdf that was auto-generated by sw2urdf and inertia value calculated by solidworks, the problem is the ixx value in urdf was equal to Lxx value in solidworks but no t equal to Ixx value in solidworks, so should I also fill the Lxx value to ixx? Thank you for help!


Not an answer, but I've referred ppl to SolidWorks to Gazebo Robot Simulation on the SolidWorks blog in the past.
Ok,thank you!