depth_image_proc: How do we use it...exactly?
Folks,
I can't get depth_image_proc to work. image_proc works, not problem, but the depth one is driving me crazy. I am already publishing a camera/depth_registered/image_raw topic (16bit mm), but I need the 32float version.
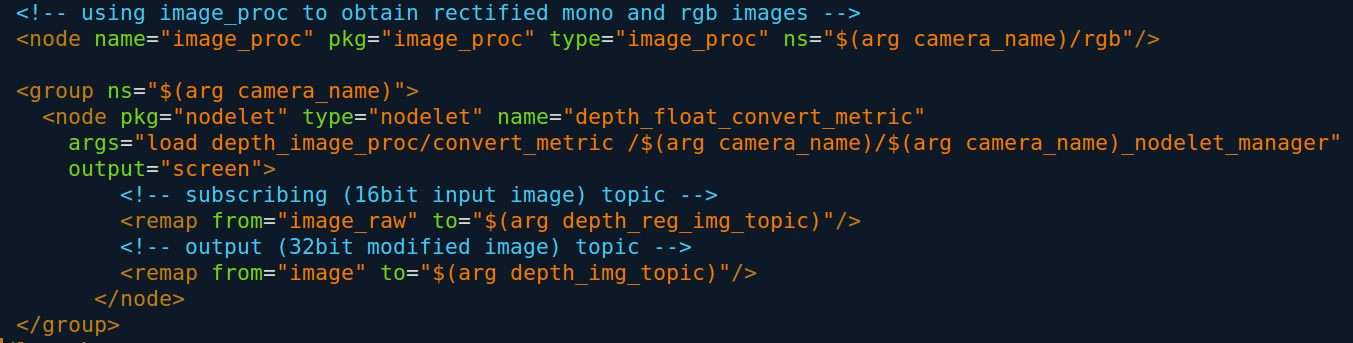
This how I tried to initialize depth_image_proc:
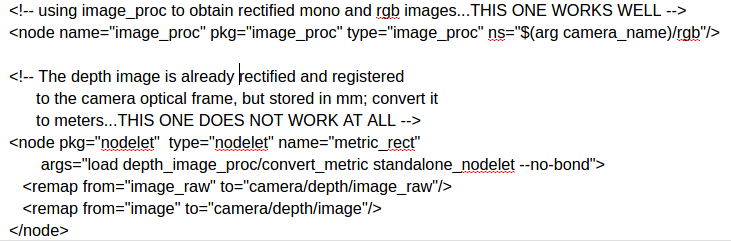
I don't know what the "standalone_nodelet" part does, not the "--no-bond" part. I just saw other people's code on github and tried to use it. I even changed the standalone_nodelet parameter for my "camera/manager" nodelet, and nothing.
add a comment