
Rviz | tf | scan - (No transform to fixed base)
Hello all, I'm facing issues with scan data visualization on rviz. The following pictures show the problem:

image 1
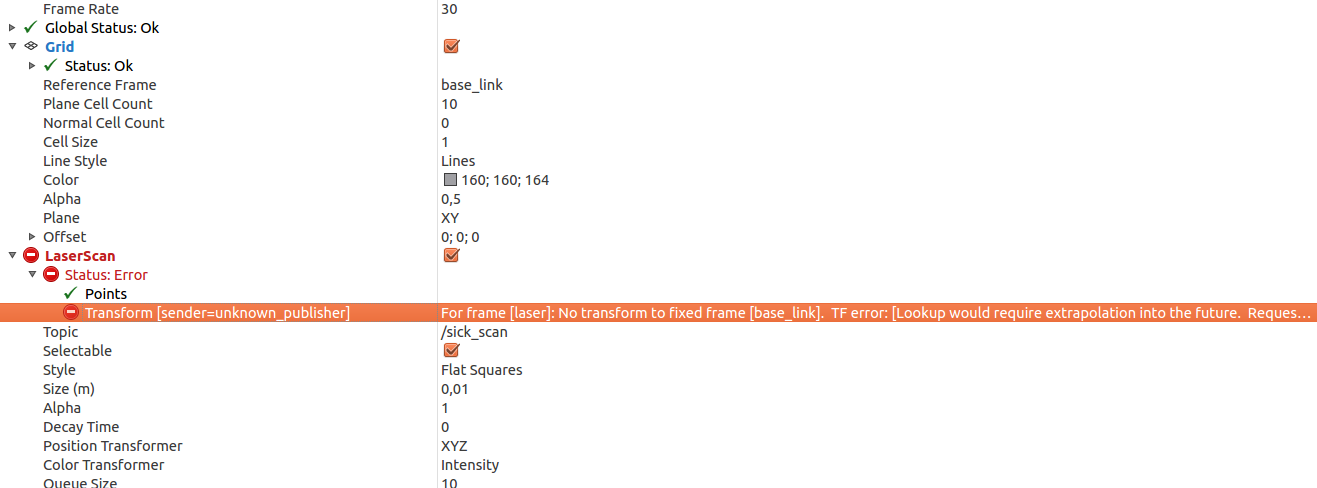
image 2
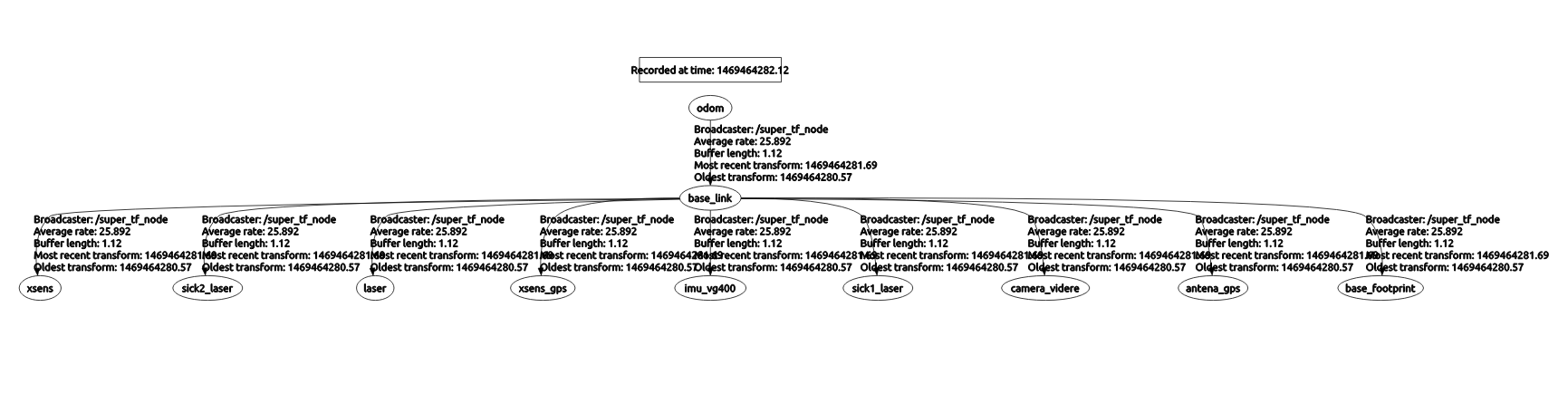
As we can see from image 1, the transformation between the laser and base_link frames is defined, nevertheless rviz does not find this transformation and so can not display the scan data. To be more precisely, the reported message is:
Transform [sender=unknown_publisher]
and in sequece
For frame [laser]: No transform to fixed frame [base_link]. Tf error: [Lookup would require extrapolation to the future. Requested time 1469464365.119867794 but the latest data is at time 1469463838.127784645, when looking up transform from frame [laser] to frame [base_link]]
Well, I know that a lot of problems of visualizing data in rviz is related with timestemp and I a read a bunch of topic theads here, in the forum, but I do not realize how to solve this issue.
Here goes additional information and pictures:
The command:
rosrun tf tf_echo laser base_link
and
rosrun tf tf_echo base_link laser
runs without problem. But the command:
rosrun tf tf_monitor laser base_link
return a strange message that is:
RESULTS: for laser to base_link Chain is: odom -> base_link -> base_link -> base_link -> base_link -> base_link -> base_link -> base_link -> base_link ->
base_link Net delay avg = 0.350788: max = 0.548574
Frames: Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309 Frame: base_link published by unknown_publisher Average Delay: 0.400253 Max Delay: 0.400309
All Broadcasters: Node: unknown_publisher 256.402 Hz, Average Delay: 0.400246 Max Delay: 0.40031
as we can see, there is a strange loop behavior in the Chain (first line)
The using multiple machines, so maybe there is a problem with synchronization.
Any clue to where should I start or to what should I do to resolve this???
Thanks in advance!!!
