
robot don't move in the map
hi
i am trying to build map using slam now i publish odometery data and every thing going good but when i try to build the map it make part of the map then say transformer error so i use this befor every thing "rosrun tf static_transform_publisher 0 0 0 0 0 0 odom base_footprint 100"
and then no error occure but the robot model or the axises don't move when i move my robot this problem toke alot of time and i can't solve it i will give all the nessery information : i use this from this package approximately the same methode
https://github.com/sungjik/my_persona...
i am using the base controller with some modification not in the tf case just in parameter and so on imu data .. etc and i am using the following launch robot_config launch with and slam launch . i use the arduino to publish all sensor like imu and encoder and every thing is being published correctly and odom change when move and every thing is good and robot move when i twist to it but nothing change in the map if i move the robot in the real world robot still in the same position in the map and just the map that change i think this the robot don't take the odometery to the base link or something i hope you can help me with this
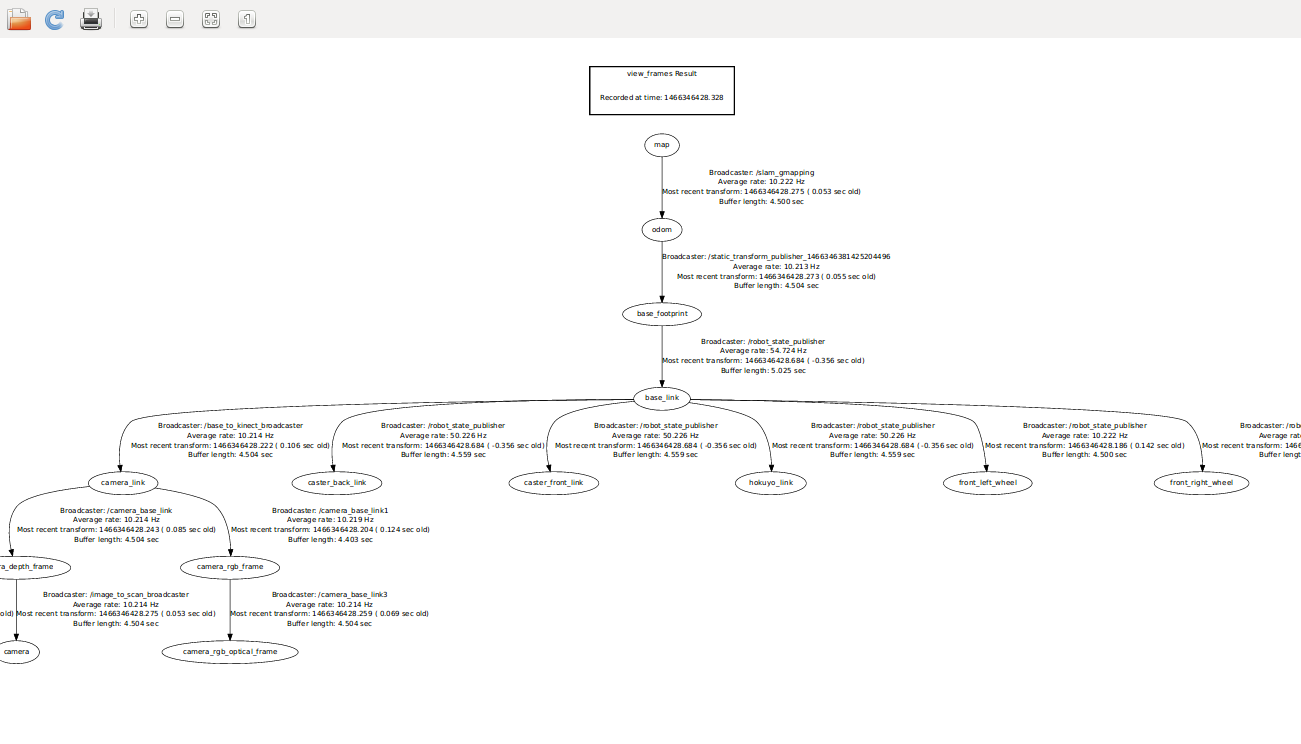
the tf tree after using this line ""rosrun tf static_transform_publisher 0 0 0 0 0 0 odom base_footprint 100"
i wish any one can help me if any one need further information ask for it i will answer . thanks for help ^_^.
