building a map using slam_gmapping
Hello,
I am using ubuntu 14.04 and indigo version.
Also, I used kinect and custom made robot with encoders.
I published laser scan, odom, and tf information and now I'm starting building the map but I faced some problems
This the launch file for publishing laser scan information:
<launch>
<arg name="camera" default="camera"/>
<include file="$(find openni_launch)/launch/openni.launch">
<arg name="camera" default="$(arg camera)"/>
</include>
<node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan">
<remap from="cloud_in" to="/camera/depth/points"/>
</node>
</launch>
And I can view the laser scans successfully in rviz.
This is the node to publish odom information (the nodes assumes the robot is moving in circle):
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
int main(int argc, char** argv){
ros::init(argc, argv, "odometry_publisher");
ros::NodeHandle n;
ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 50);
tf::TransformBroadcaster odom_broadcaster;
double x = 0.0;
double y = 0.0;
double th = 0.0;
double vx = 0.1;
double vy = -0.1;
double vth = 0.1;
ros::Time current_time, last_time;
current_time = ros::Time::now();
last_time = ros::Time::now();
ros::Rate r(1.0);
while(n.ok()){
ros::spinOnce(); // check for incoming messages
current_time = ros::Time::now();
//compute odometry in a typical way given the velocities of the robot
double dt = (current_time - last_time).toSec();
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
double delta_th = vth * dt;
x += delta_x;
y += delta_y;
th += delta_th;
//since all odometry is 6DOF we'll need a quaternion created from yaw
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
//first, we'll publish the transform over tf
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
//send the transform
odom_broadcaster.sendTransform(odom_trans);
//next, we'll publish the odometry message over ROS
nav_msgs::Odometry odom;
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
//set the position
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
//set the velocity
odom.child_frame_id = "base_link";
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
//publish the message
odom_pub.publish(odom);
last_time = current_time;
r.sleep();
}
}
I followed the steps in this tutorial
When I reached this command : rosbag play --clock mylaserdata.bag the other terminal gives this error:
Warning: TF_OLD_DATA ignoring data from the past for frame base_laser at time 1.4273e+09 according to authority unknown_publisher
Possible reasons are listed at http://wiki.ros.org/tf/Errors%20explained
at line 260 in /tmp/buildd/ros-indigo-tf2-0.5.7-0trusty-20141230-0040/src/buffer_core.cpp
Also, after typing this command: rosrun map_server map_saver it says Waiting for the map and didn't do any thing.
UPDATE:
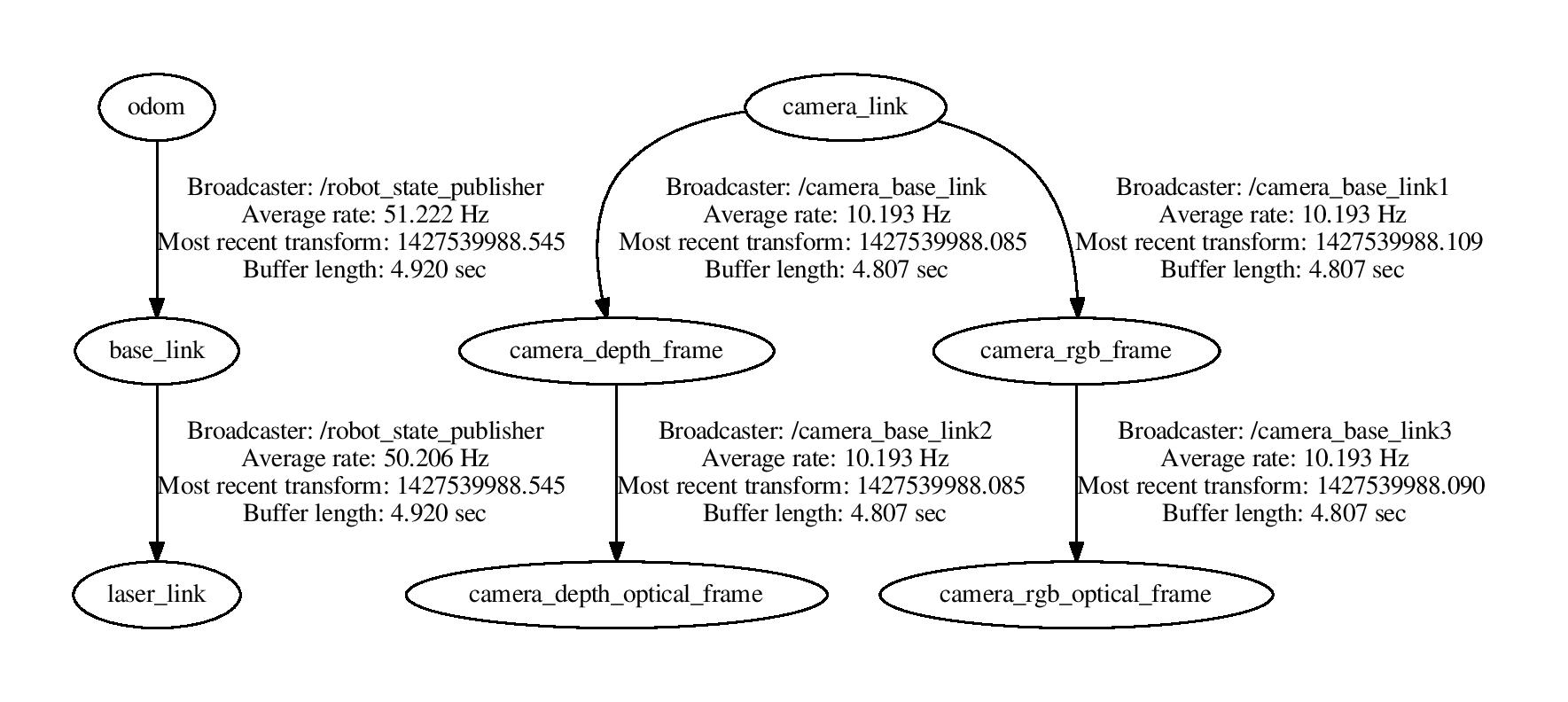
I used robot_state_publisher package to publish the TF
and this is the TF of the robot: