
Local costmap static without any sensor information [closed]
I am relatively new to ROS and don't have much experience it will be a great help if someone can answer my quetsion.
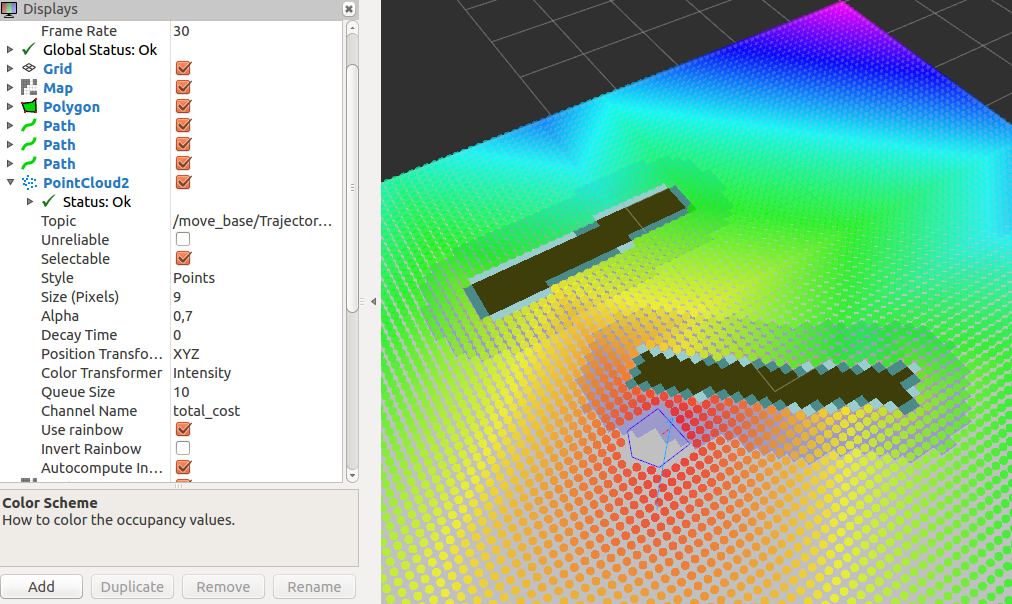
I am trying to move a robot around using a static map. The global path plannig is correct but it is not showing local costmap (not considering obstacles). I am not using any laser scanner but Kinect Fusion with a Kinect to creating the map and for pose estimation. Is it possible to inflate obstacles without use of any kind of sensor data.
In the screenshot of rviz you can see that the positions near the obstacles have low costs in the local costmap. Due to this the robot will move in the direction of the obstacle.
costmap configuration:
local_costmap:
global_frame: odom
robot_base_frame: base_link
update_frequency: 3.0
publish_frequency: 2.0
static_map: true
robot_footprint: [[0.13, 0.235], [-0.22, 0.235], [-0.35, 0.0], [-0.22, -0.235], [0.13, -0.235]]
rolling_window: false
width: 6.0
height: 6.0
resolution: 0.1
Global costmap:
global_frame: /map
robot_base_frame: base_link
update_frequency: 5.0
static_map: true
costmap_common_param
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[0.13, 0.235], [-0.22, 0.235], [-0.35, 0.0], [-0.22, -0.235], [0.13, -0.235]]
#robot_radius: ir_of_robot
inflation_radius: 0.55
transform_tolerance: 1.0


{kind=link}
Please post your costmap configurations by editing your question. Please put the configurations into a preformatted text (using the buttons with 101010 on it).