
Model can't be fixed the orientation

Hello, ROS community!
I was learning the tutorial about the placing models in some orders and I wanted to implement it in my project. I took some models from 3D google repository and corrected them by following this tutorial.
My problem is the model (white_shelf2) can't be rotated on 90 degrees. I tried differently to fix the numbers of orientation (yaw exactly) in the world file (below it attached), but I cant still understand why the number were not published in Gazebo.
<?xml version="1.0" ?>
<sdf version="1.5">
<world name="default">
<include>
<uri>model://ground_plane</uri>
</include>
<include>
<uri>model://sun</uri>
</include>
<include>
<uri>model://market_layout</uri>
<name>market layout</name>
<pose>0.107915 -0.228911 0.00 0.00 0.00 0.00</pose>
</include>
<include>
<uri>model://kassa</uri>
<name>kassa</name>
<pose>-4.712210 0.153002 -0.000002 0.000003 0.00 -1.573301</pose>
</include>
<population name="white_shelves_population1">
<model name="white_shelf1">
<include>
<static>true</static>
<uri>model://white_shelves</uri>
</include>
</model>
<pose>0.5 -7.4 0 0 0 0</pose> <!--pose of all shelves together -->
<box>
<size>14 0.5 3</size> <!-- <size> is size of all shelves; all shelves will be in the size together -->
</box>
<model_count>14</model_count>
<distribution>
<type>linear-x</type> <!-- models place along x-axis -->
</distribution>
</population>
<population name="white_shelves_population2">
<model name="white_shelf2">
<include>
<static>true</static>
<uri>model://white_shelves</uri>
</include>
</model>
<pose>7.313923 1.442630 0.0 0.0 0.0 1.623000</pose>
<box>
<size>0.5 1.0 3.0</size>
</box>
<model_count>1</model_count>
<distribution>
<type>linear-y</type>
</distribution>
</population>
</world>
</sdf>
This is screenshots:

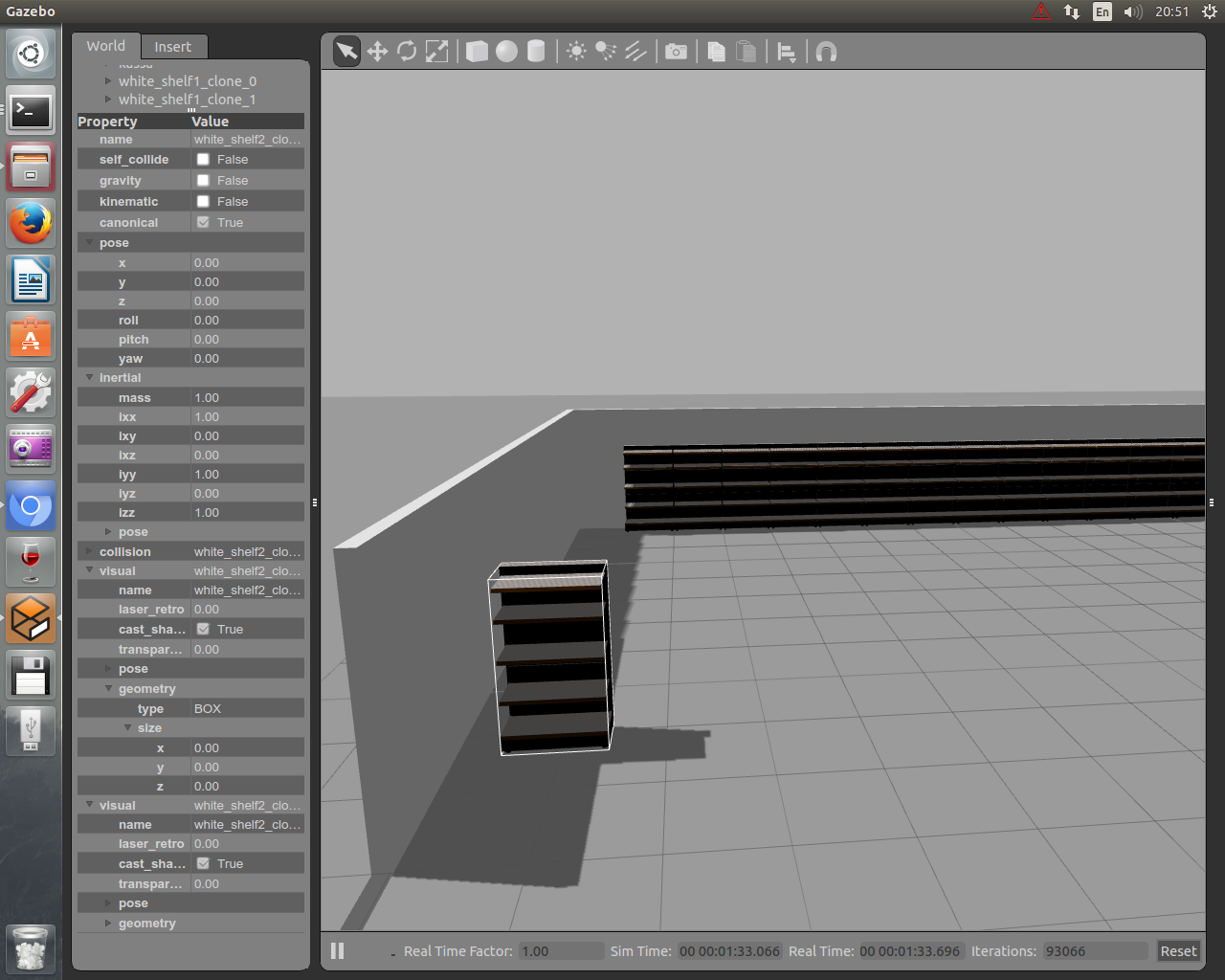
In GUI, I placed the model in right position for getting the pose coordinates. Because, the "save" function doesn't work there, so I fixed the coordinates in my world file.
Jade, Ubuntu 14.04, Gazebo 5.1.0
Thank you in advance!
add a comment
