
Error in move_base while simulating navigation stack
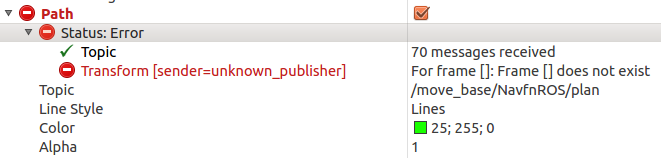
When i launch the navigation launch file the robot fails to keep the plan and mess up in the middle, It throws the below warning and an error in Rviz (Ref image)
[ WARN] [1455133160.311617027, 27.096000000]: MessageFilter [target=map ]: Discarding message from [/move_base] due to empty frame_id. This message will only print once.
[ WARN] [1455133160.311926656, 27.096000000]: Invalid argument passed to canTransform argument source_frame in tf2 frame_ids cannot be empty
[ WARN] [1455133160.710917579, 27.118000000]: Invalid argument passed to canTransform argument source_frame in tf2 frame_ids cannot be empty
Edit 1:
I am using AMCL localization and dwa planner, even base_planner resulted in same error.
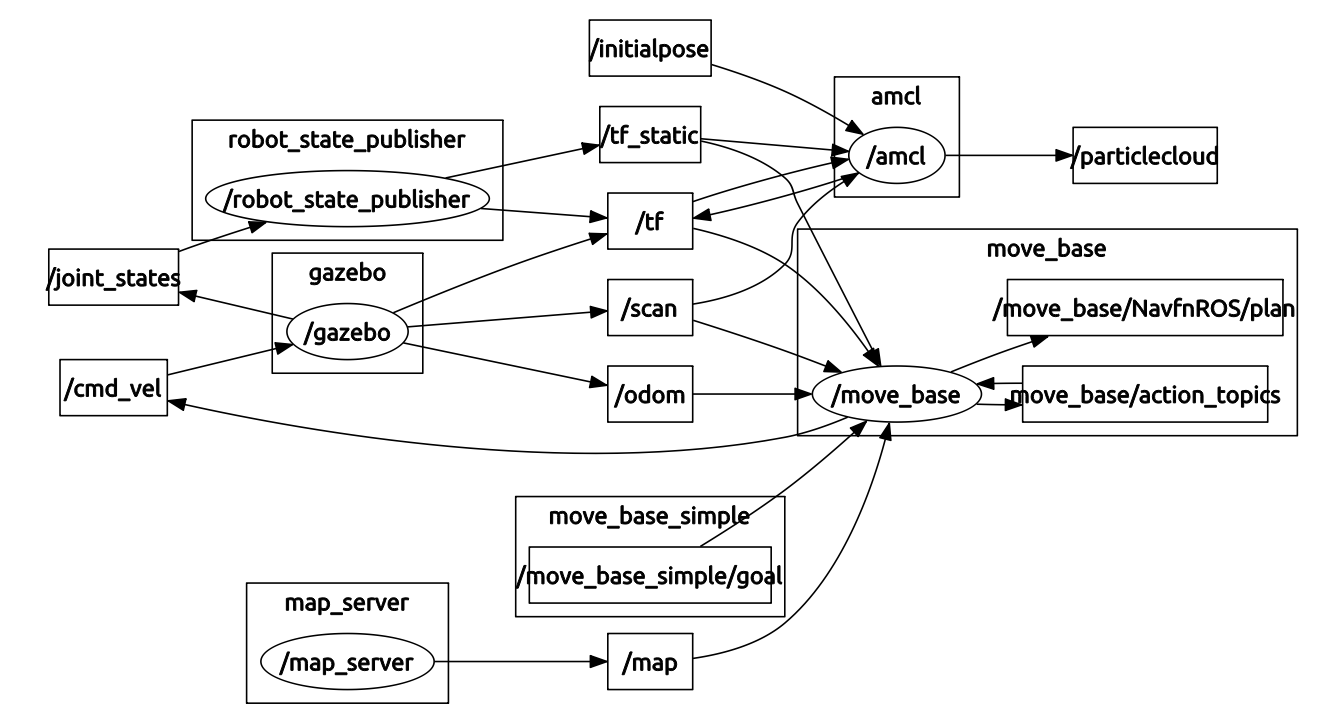
rqt_graph result

more information: which planners, which config, which localization, ... Best provide a link to GitHub...
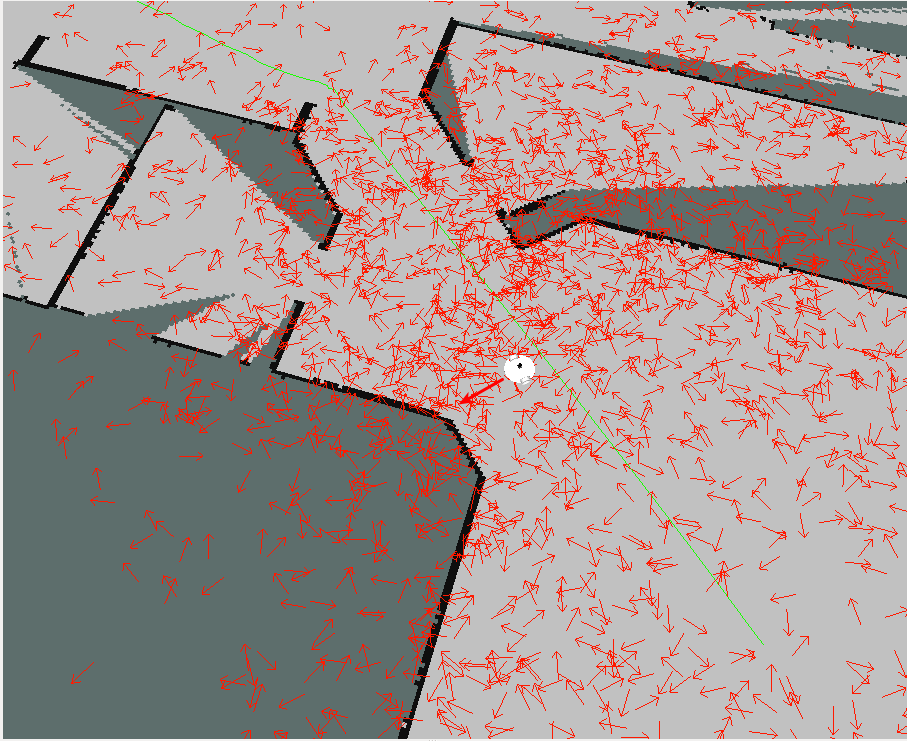
What you see in rviz seems like a call to
global_localizationinamcl.But without more information, we cannot help you...
Thank you, I have added the link and details in my new edit above.
There is something seriously wrong with (at least) your localization. Spreading the particles out like this definitely not right. Recheck your odometry (does it make sense? To me, it seems the robot is rotating the other direction in rviz then in gazebo, but it is hard to see), laser scans, ...
My laser scan and odometry are perfect. I have executed the test procedure over here and its successful.
I have played with robot in navigation environment, when i move forward or backward the particles are spread out but when i stop and rotate in a place the robot is localized perfectly in a couple of revolutions. also robot turns in same direction in rviz and gazebo.
Have you solved the first warning (and remember it by any chance) ?