
compiling MAVROS generates error
We need to build MAVROS from source and are getting the following error:
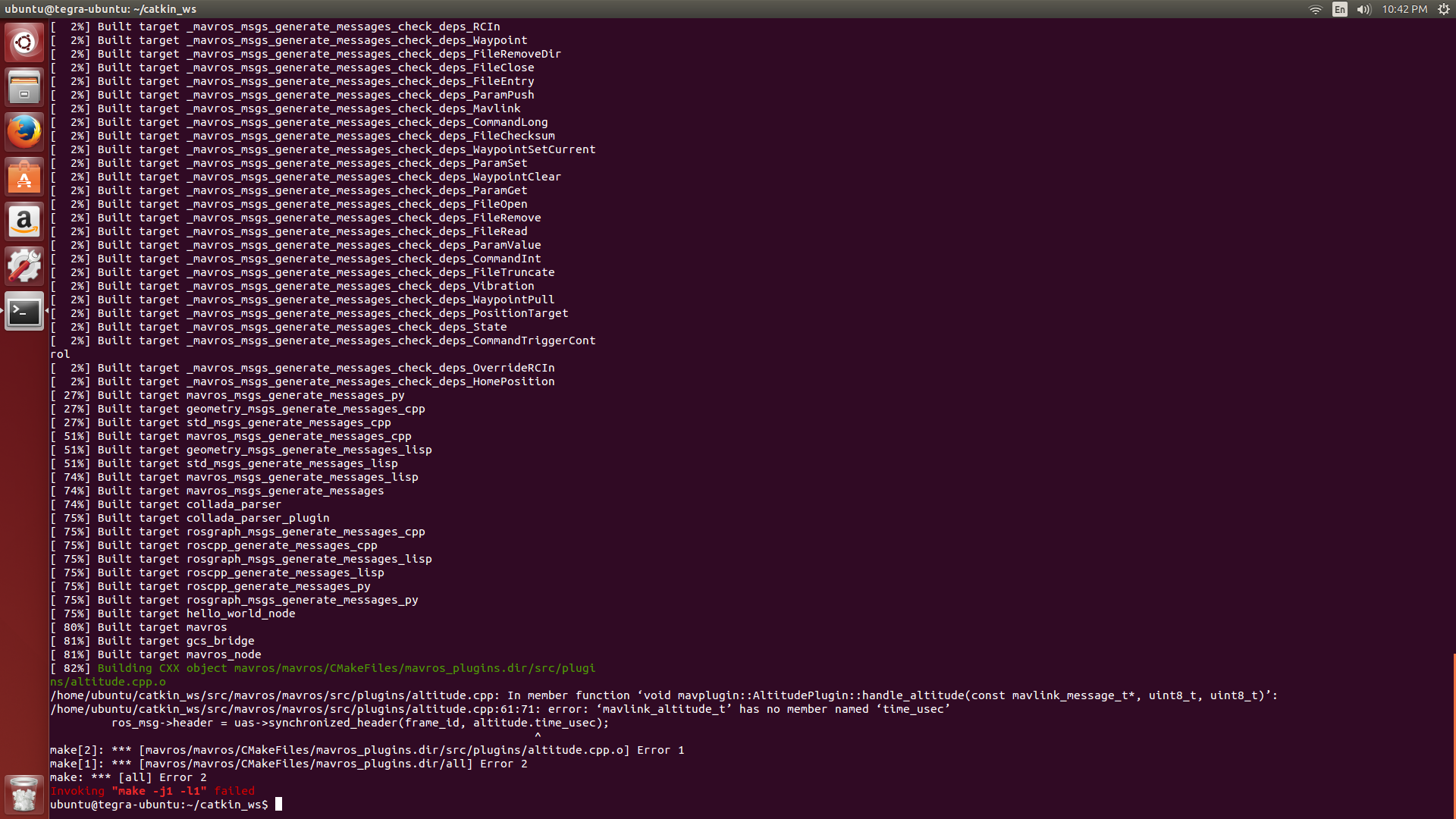
[ 88%] Building CXX object mavros/mavros/CMakeFiles/mavros_plugins.dir/src/plugins/altitude.cpp.o
/home/john/catkin_ws/src/mavros/mavros/src/plugins/altitude.cpp: In member function ‘void mavplugin::AltitudePlugin::handle_altitude(const mavlink_message_t*, uint8_t, uint8_t)’:
/home/john/catkin_ws/src/mavros/mavros/src/plugins/altitude.cpp:61:71: error: ‘mavlink_altitude_t’ has no member named ‘time_usec’
ros_msg->header = uas->synchronized_header(frame_id, altitude.time_usec);
^
make[2]: *** [mavros/mavros/CMakeFiles/mavros_plugins.dir/src/plugins/altitude.cpp.o] Error 1
The source was obtained from https://github.com/mavlink/mavros and receive the same error when trying https://github.com/vooon/mavros as well. I tried straight GIT cloning as well as WSTOOL to install source and used catkin_make. This was generated on an Ubuntu Trusty version with ROS Indigo.
Any advice would be greatly appreciated,
John Setzer



What did you expect
wstoolwould do differently?Did you install mavlink?