
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
Hi , do you solve it now?
I get the same error and tried all the ways I google.
Here is my error log
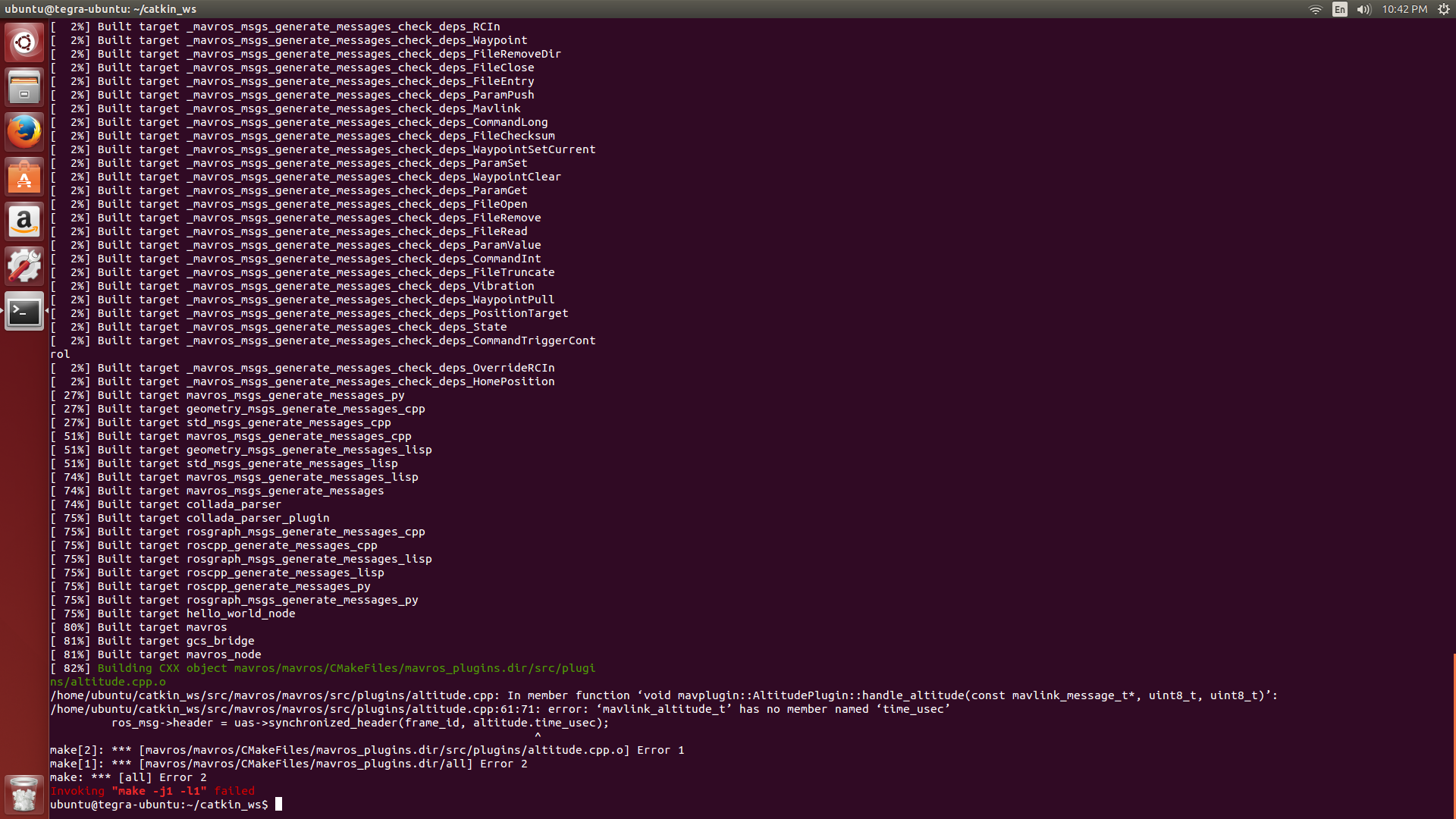
I mark it like this and build success.
/home/john/catkin_ws/src/mavros/mavros/src/plugins/altitude.cpp
//ros_msg->header = uas->synchronized_header(frame_id, altitude.time_usec);
It build successful and ok to run.
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
