
range_sensor_layer can't transform from map to /us1 [closed]

Hi all,
I am using Ultrasound sensors and Hokuyo laser for navigation. I am using range_sensor_layer for ultrasound sensors. The problem is when I publish the sensor_msgs/Range message and use the range_sensor_layer, I get the following error:
[ERROR] [1431956010.233195664]: Range sensor layer can't transform from map to /us1 at 1431956010.107522
I am using static_transform_publisher for the transformation between /base_link and /us1 :
<node pkg="tf" type="static_transform_publisher" name="base_link_US1" args="0.28 0.12 0.53 1.57 0.0 0.0 /base_link /us1 100" />
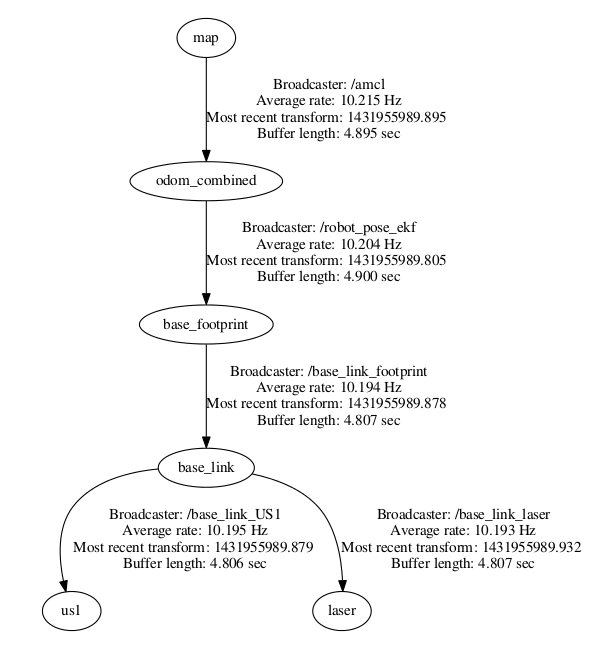
I am not able to see why am I getting this error as the tf tree is properly set up and there is a transformation from map to /us1:
global_costmap_params.yaml
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: sonar_layer, type: "range_sensor_layer::RangeSensorLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
#Configuration for the sensors that the costmap will use to update a map
obstacle_layer:
observation_sources: laser_scan_sensor
laser_scan_sensor: {data_type: LaserScan, sensor_frame: /laser, topic: /scan, expected_update_rate: 0.4,
observation_persistence: 0.0, marking: true, clearing: true, max_obstacle_height: 2.0, min_obstacle_height: 0.0, inf_is_valid: true}
sonar_layer:
topics: ['/US1']
no_readings_timeout: 1.0
clear_threshold: 0.2
mark_threshold: 0.8
clear_on_max_reading: true
local_costmap_params.yaml
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: sonar_layer, type: "range_sensor_layer::RangeSensorLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
#Configuration for the sensors that the costmap will use to update a map
obstacle_layer:
observation_sources: laser_scan_sensor
laser_scan_sensor: {data_type: LaserScan, sensor_frame: /laser, topic: /scan, expected_update_rate: 0.4,
observation_persistence: 0.0, marking: true, clearing: true, max_obstacle_height: 2.0, min_obstacle_height: 0.0, inf_is_valid: true}
sonar_layer:
topics: ['/US1']
no_readings_timeout: 1.0
clear_threshold: 0.2
mark_threshold: 0.8
clear_on_max_reading: true
Does anyone have any idea what is going wrong here? Please let me know if you need more information from me. Any help will be appreciated.
Thanks a lot.
Naman Kumar
Closed for the following reason
question is not relevant or outdated by
tfoote
close date 2017-04-30 03:05:57.986062
add a comment
