
youbot_gazebo_ros - center of mass

Hi there,
I'm using youbot_gazebo_ros, however I think that some com(center of mass) positions are wrong.
What is my misunderstanding ?
I carried out the follows.
1. roslaunch youbot_gazebo_ros youbot.launch
2. rosrun rviz rviz (In order to check the link axes.)
3. rosservice call /gazebo/get_link_properties "link_name: 'arm_link_4'"
As a result, I got the follow.
com:
position:
x: 0.00011
y: 0.05103
z: -0.02319
I think the com is the position relative to the link frame.
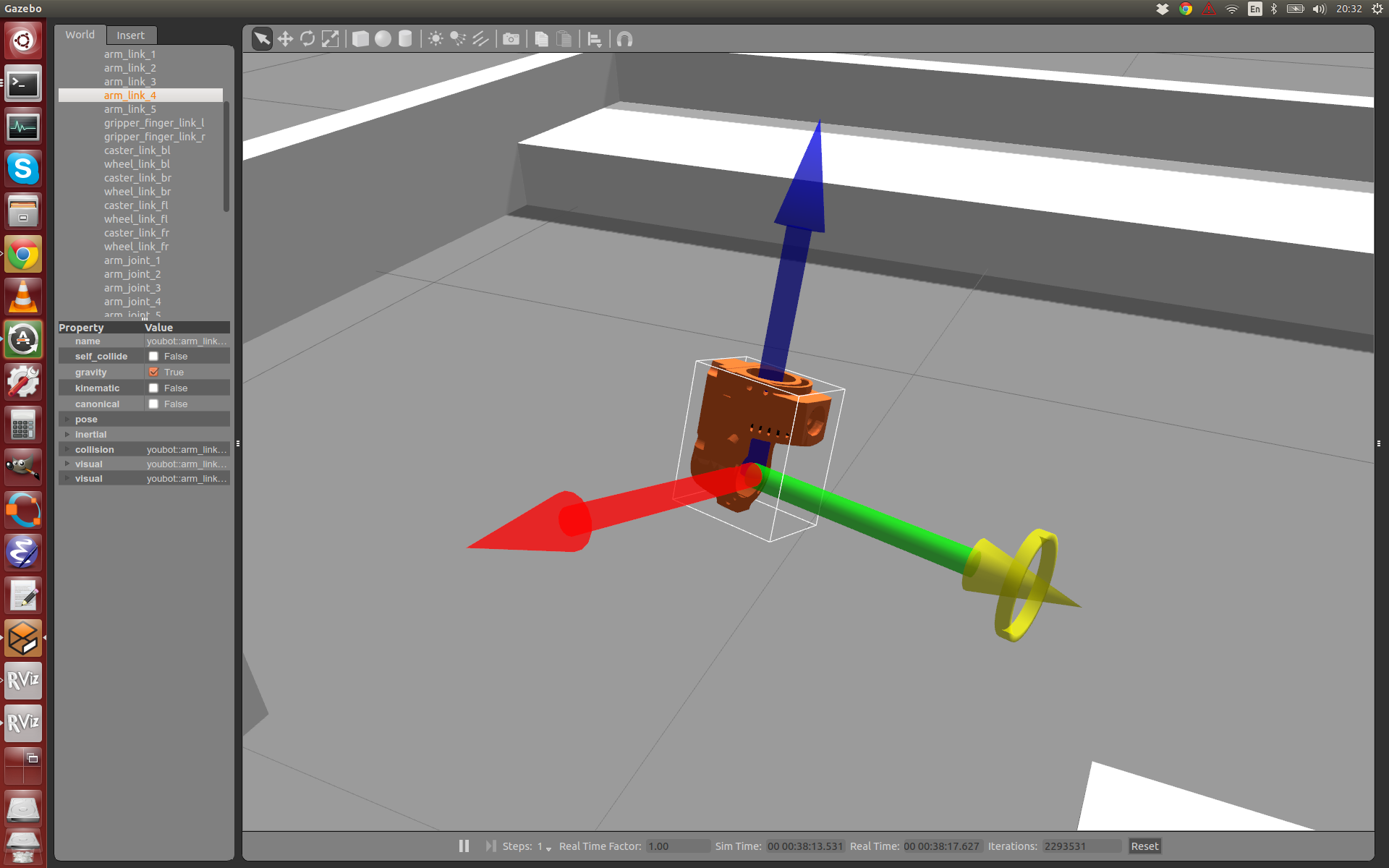
Here, it's really strange. The position is almost out of the object(See below).
The picture shows a joint frame. According to rviz, it's coincident with link frame.
C:\fakepath\Screenshot from 2015-04-09 20:32:13.png
This kuka youbot model is widely used, so I guess that it's not wrong.
Then, what is my misunderstanding ? The com position is relative to ... what ?
Thanks in advance.

{kind=link}