
What is displayed in an RVIZ map?
I am looking at a Map display in RVIZ, using the view_navigation.launch file from the turtlebot_rviz_launchers package (in ROS Hydro). The map is created from the slam_mapping node fed from the depthimage_to_laserscan/DepthImageToLaserScanNodelet nodelet, fed from a Kinect sensor. My robot is stationary at the moment. (It has to be, it's a table :-), but I publish a static TF frame showing that it is stationary.)
I have disabled all of the displays except Map and Grid, and have removed (i.e. clicked on the "Remove" button) the Global Map and Local Map displays (more on that in a minute).
I couldn't upload a screenshot of what I saw when I first wrote this (because I was a newbie and didn't have enough karma to include images), but ahendrix bumped my karma, so I can now include a screenshot. I'll leave my original textual description in place still.
Here is what I see:
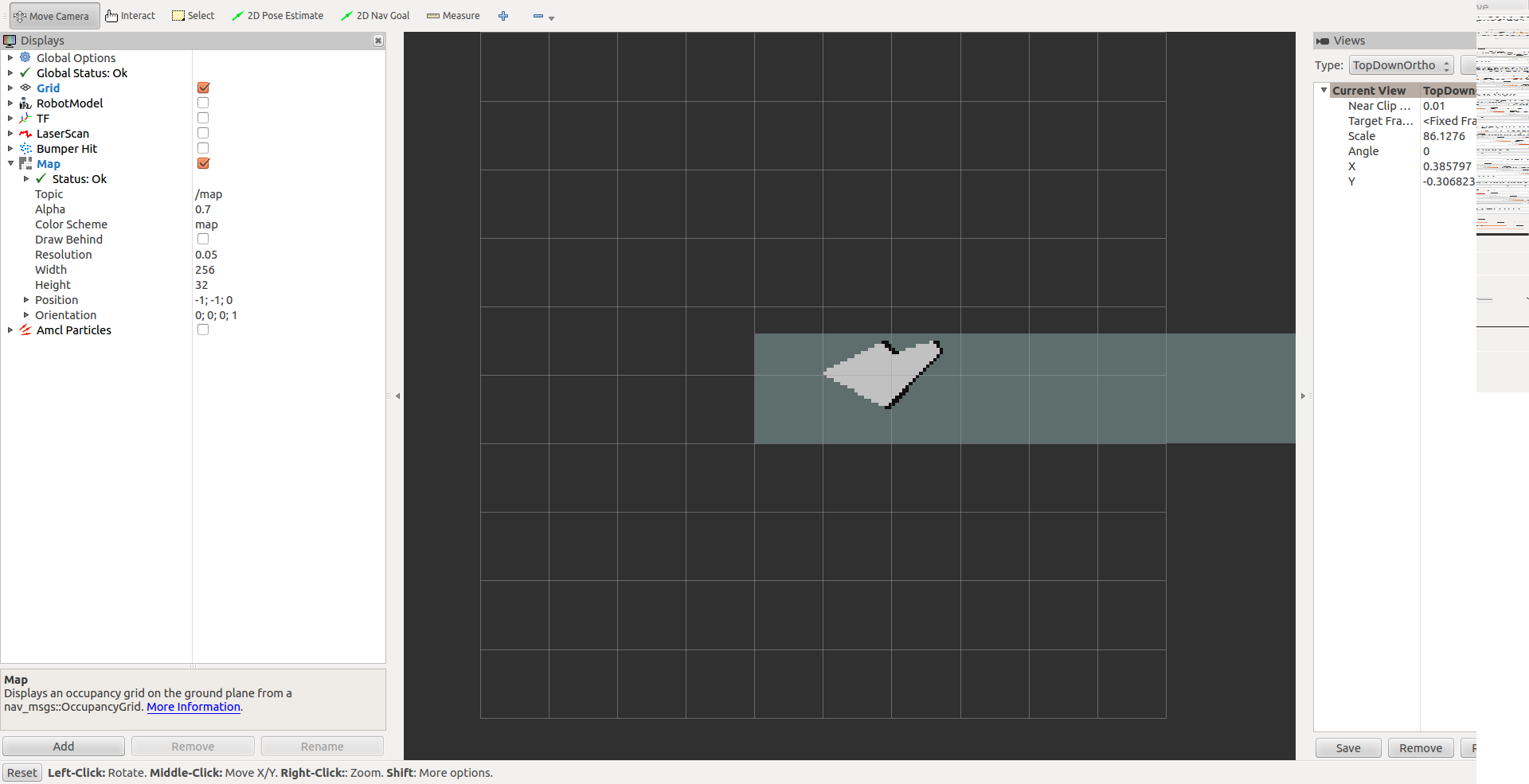
I can see the grid (of course).
I can see black lines which match the walls that my Kinect can see. These match the documentation on the wiki at /rviz/DisplayTypes/Map) as being cells that are occupied. So far this makes sense.
But I can also see a greyish green transparent horizontal bar that is about 1.5 grid cells tall, whose lower left corner is at (-1, -1) and which extends to the right off the grid. What is this?
I can see a light grey area, shaped like a pie wedge, extending from the origin to the wall markers. This would seem to be cells for which the occupancy is "unknown" since it is grey. This seems strange to me that the cells have unknown occupancy, since the (fake) laser can see all the way through them right to the solid wall. Perhaps they are supposed to be "white" according to the documentation. It just doesn't look very white to me. [EDIT: it _is_ white if I change the alpha to 1.0]. OK, this makes sense to me as well.
If I don't remove the Global Map and Local Map displays (even if they are disabled), there is yet another greyish greenish 1x1 square whose left corner is at the origin. It goes away if I remove both the Global Map and Local Map displays. [EDIT: Ahhh I just noticed that the Map shows up as a 1x1 square if I delete it (and the other 2 maps) and re-add it. It turns back into the display I described above once I subscribe to the /map topic. Furthermore, I notice that I don't have anything publishing /move_base/global_costmap/costmap and /move_base/local_costmap/costmap topics, so I expect the 1x1 square is some sort of default visualization for the Global and Local Map displays that is shown in the absence of anything rational to be displayed. OK, I suppose that makes sens now too.]
Finally, when I read the documentation, I see that the Map display has ...


I've bumped your karma. You should be able to post links and images now.