
How to use gscam with ar_pose?
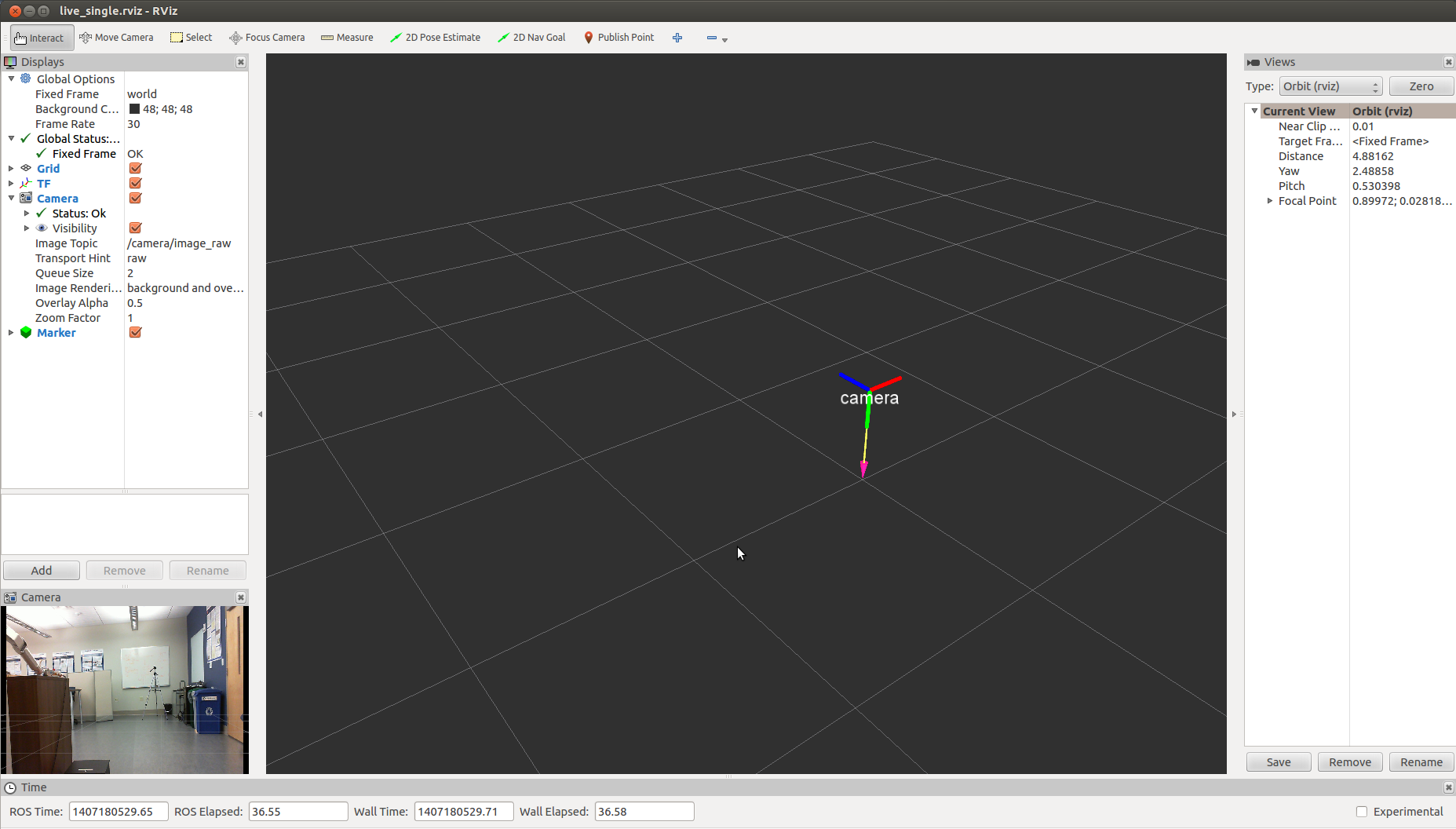
Hi, I'm new to ROS and I'm trying to use ar_pose live tracking with webcam in the laptop (using gscam). But I'm not receiving any image in rviz. This is the error I receive in the terminal
[ERROR] [1403618585.907565185]: No camera_parameters.txt file found. Use default file if no other is available.
ERROR: cannot launch node of type [ar_pose/ar_single]: can't locate node [ar_single] in package [ar_pose]
Processing...
[rviz-1] process has died [pid 10906, exit code -11, cmd /opt/ros/hydro/lib/rviz/rviz -d /home/gautham/hydro_workspace/sandbox/src/ar_tools/ar_pose/launch/live_single.rviz __name:=rviz __log:=/home/gautham/.ros/log/8edb2bfe-fb8f-11e3-8219-b13485d129c0/rviz-1.log].
This is my launch file
<launch>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find ar_pose)/launch/live_single.rviz"/>
<node pkg="tf" type="static_transform_publisher" name="world_to_cam"
args="0 0 0.5 -1.57 0 -1.57 world camera 10" />
<node ns="camera/gscam" pkg="image_proc" type="image_proc" name="image_proc"/>
<node ns="camera" pkg="gscam" type="gscam" name="gscam"
respawn="false" output="screen">
<param name="width" type="int" value="320" />
<param name="height" type="int" value="240" />
<param name="fps" type="int" value="30" />
<param name="frame" type="string" value="camera" />
<param name="device" type="string" value="/dev/video0" />
<param name="camera_info_url" type="string"
value="camera/gscam/camera_info" />
</node>
<node name="ar_pose" pkg="ar_pose" type="ar_single" respawn="false"
output="screen">
<param name="marker_pattern" type="string"
value="$(find ar_pose)/data/4x4/4x4_1.patt"/>
<param name="marker_width" type="double" value="152.4"/>
<param name="marker_center_x" type="double" value="0.0"/>
<param name="marker_center_y" type="double" value="0.0"/>
<param name="threshold" type="int" value="100"/>
<param name="use_history" type="bool" value="true"/>
</node>
</launch>
And in the rviz file:
Image Topic: camera/gscam/image_raw
Any help is appreciated. Thanks in advance :)


I've got the same problem, but I'm using the same node setting as in gscam/examples/v4l.launch. It gives no error in terminal but still cannot receive image.But the image_view worked fine .
Hi! Check the depencencies
rosdep install ar_poseand then build it usingrosmake ar_pose. it worked for me!