
Start to teleop My own Robot Model
Hi , I built my own robot model as a urdf file .. Like In this Tutorial
It looks In RVIZ :
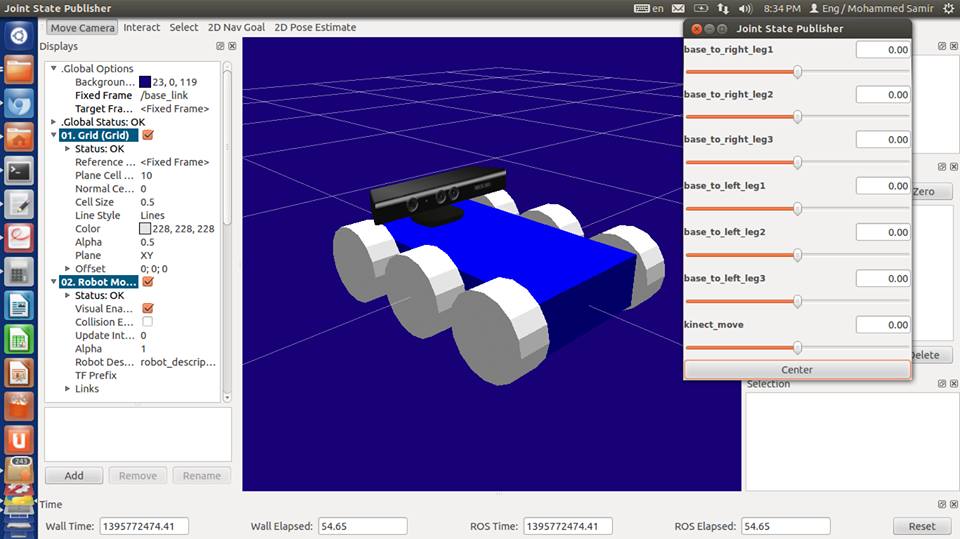
Now, I want to start to test apps on my model like teleop to start to move it with Keyboard .
What Should I do ?? I think firstly Open a world to Gazebo Secondly, Load my robot on the world .... I DON'T Know HOW ??????????? Third, Start to operate teleop node to start to move .... I WANT a CODE fit to my robot model ?? Actually I can't find a Stack that can operate apps on my robot
thanks



hello salma , i am now working on same you project , really i found the problems in the control for move it . i want your help if you have a time for give me some indications ! thank you . my gmail : raissimohamedimam@gmail.com for contact me . i am in wait your help by all passion ! thank you
Hello there, I want to ask you if the teleop package of turtlebot worked with your project as I am facing the same problem now ?