
How to provide transform between costmap frame and robot frame?
So a costmap_2d tutorial says this:
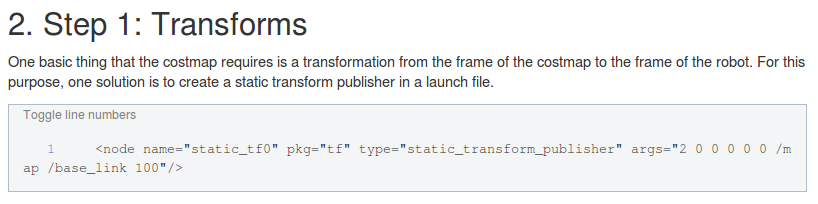
My questions are:
Since this is ONE solution, what other ones are there?
And, more specifically, how does turtlebot_navigation/amcl_demo.launch provide the transform between the map_file loaded and the turtlebot? (Because there is no such line (as in the picture above) in its launch file).
add a comment
