thanks Dimitri,
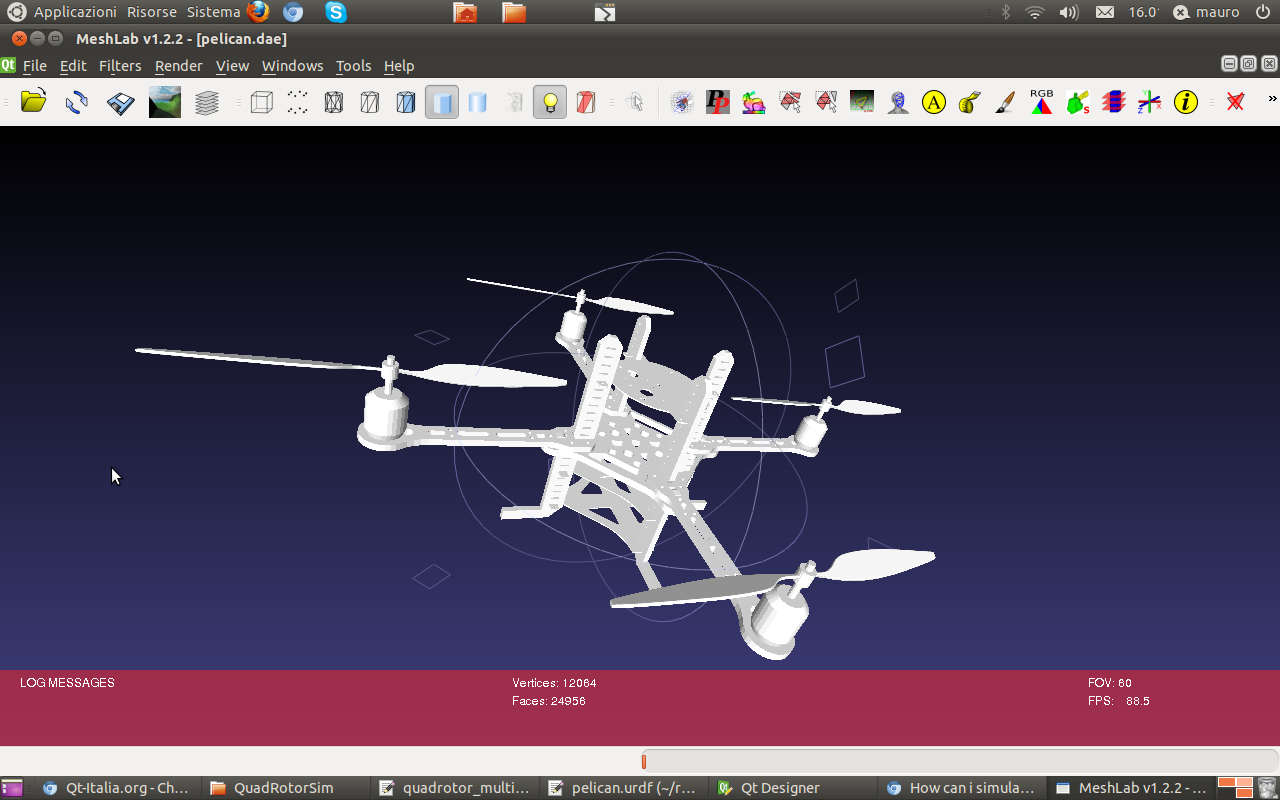
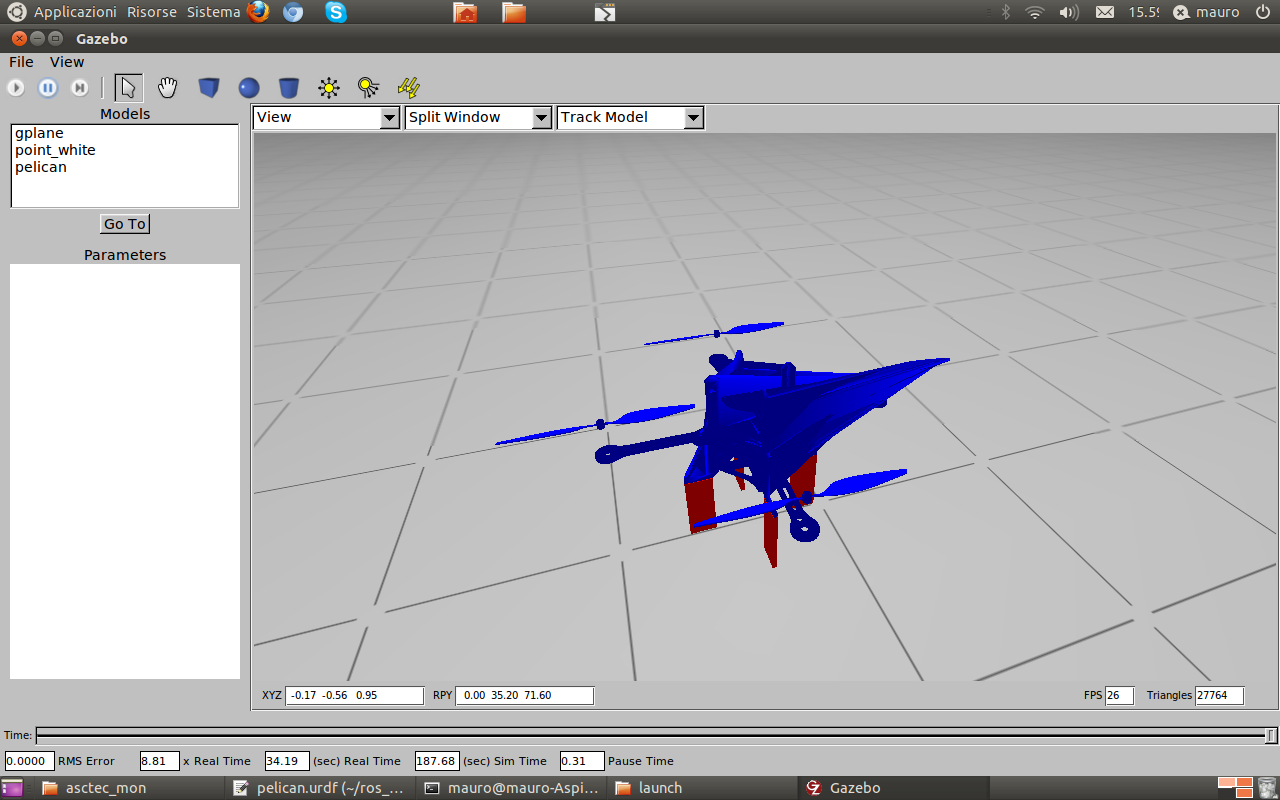
but i have a problem with the pelican.stl file. I don't know why, i can open tha file correctly with FreeCAD or MeshLab, but not with gazebo.
I can spawn the object, but it has a different shape.
The interested part of my file urdf is:
<link name="base_link">
<inertial>
<mass value="10.0" />
<origin xyz="0 0 0" />
<inertia ixx="1" ixy="0.000" ixz="0.0" iyy="1" iyz="0.0" izz="1" />
</inertial>
<visual>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 3.1415"/>
<geometry>
<mesh filename="package://my_pelican/data/pelican.stl" scale="0.001 0.001 0.001" />
</geometry>
<material name="blue">
<color rgba="0.4 0.4 0.5 1.0"/>
</material>
</visual>
<collision>
<origin xyz="0.0 0.0 0.0" rpy="1.57 0.0 3.1415"/>
<geometry>
<mesh filename="package://my_pelican/data/pelican.stl" scale="0.001 0.001 0.001" />
</geometry>
</collision>
</link>
<gazebo reference="base_link">
<kp>1000000000.0</kp>
<kd>1.0</kd>
<material>Gazebo/Blue</material>
<turngravityoff>true</turngravityoff>
</gazebo>