The Pick and Place Autonomous Demo, grasping error
Hi all
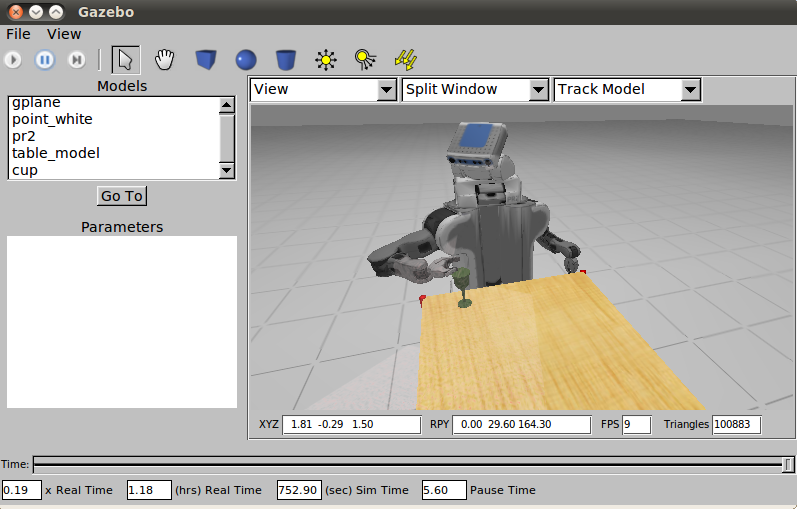
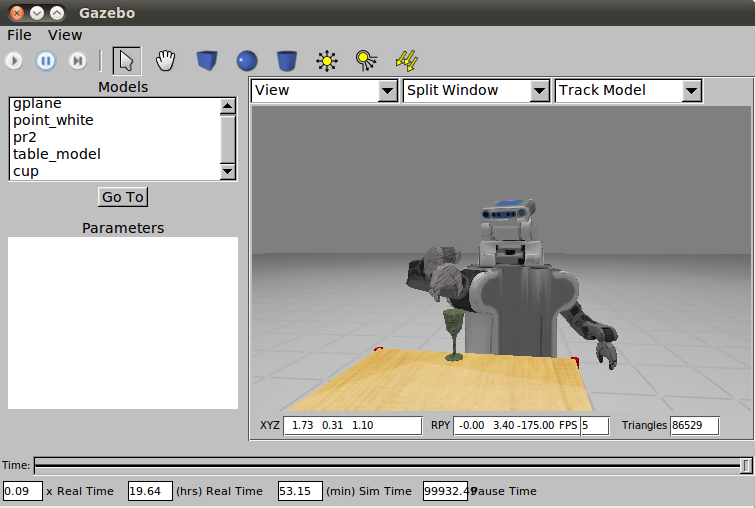
I was going through the pr2_pick_and_place_demos/Tutorials/The Pick and Place Autonomous Demo. A simulated pr2 was running. The robot always succeed to find the table, move the arm but finally failed to grasp the object, the gripper always stopped nearby the object and reported an error(I have tried different simple objects from gazebo_worlds/objects).
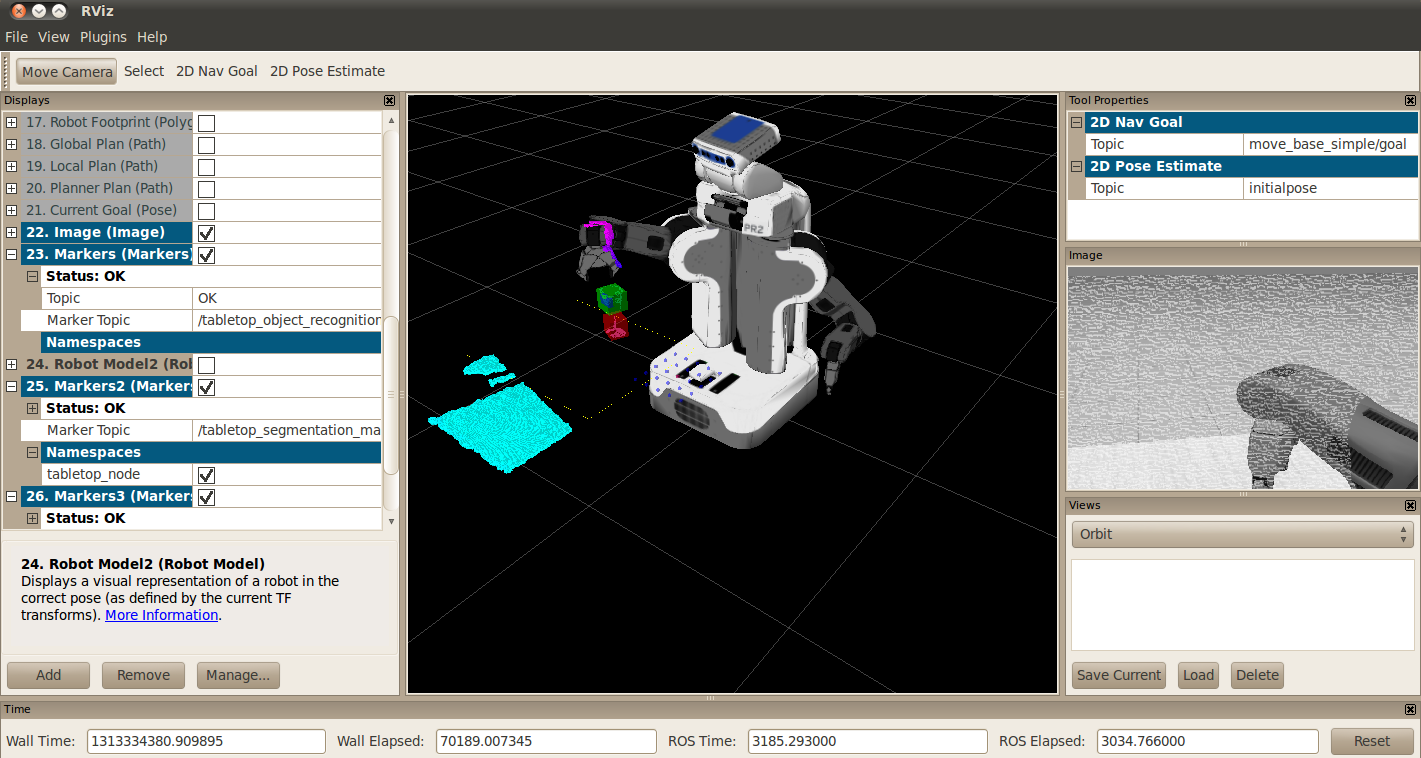
Here is the output from rviz, gazebo, PR2 Dashboard(/rosout) and terminal. Can someone tell me what could possibly go wrong? Thanks. BTW, I was using Diamondback. In the terminal with pr2_tabletop_manipulation.launch, it shows
[ WARN] [1313335466.622271285, 3307.596000000]: waiting for rgbd assembler at /rgbd_assembly
[ INFO] [1313335466.632494052, 3307.596000000]: waitForService: Service [/rgbd_assembly] has not been advertised, waiting...
Don't know if that affects anything.
PR2 Dashboard, Rosout message:
header:
seq: 13383
stamp: 3451.653000000
frame_id:
level: 8
name: /object_manipulator
msg: Hand posture controller timed out on goal (1)
file: /tmp/buildd/ros-diamondback-object-manipulation-0.4.4/debian/ros-diamondback-object-manipulation/opt/ros/diamondback/stacks/object_manipulation/object_manipulator/src/tools/mechanism_interface.cpp
function: MechanismInterface::handPostureGraspAction
line: 975
topics[]
topics[0]: /rosout
topics[1]: /object_manipulator/grasp_execution_markers
topics[2]: /object_manipulator/object_manipulator_pickup/result
topics[3]: /object_manipulator/object_manipulator_pickup/feedback
topics[4]: /object_manipulator/object_manipulator_pickup/status
topics[5]: /object_manipulator/object_manipulator_place/result
topics[6]: /object_manipulator/object_manipulator_place/feedback
topics[7]: /object_manipulator/object_manipulator_place/status
topics[8]: /head_traj_controller/point_head_action/goal
topics[9]: /head_traj_controller/point_head_action/cancel
topics[10]: /attached_collision_object
topics[11]: /r_cart/command_pose
topics[12]: /l_cart/command_pose
topics[13]: /move_left_arm/goal
topics[14]: /move_left_arm/cancel
topics[15]: /l_gripper_grasp_posture_controller/goal
topics[16]: /l_gripper_grasp_posture_controller/cancel
topics[17]: /move_right_arm/goal
topics[18]: /move_right_arm/cancel
topics[19]: /r_gripper_grasp_posture_controller/goal
topics[20]: /r_gripper_grasp_posture_controller/cancel
header:
seq: 13384
stamp: 3451.653000000
frame_id:
level: 8
name: /object_manipulator
msg: Grasp error; exception: grasp execution:mechanism:Hand posture controller timed out
file: /tmp/buildd/ros-diamondback-object-manipulation-0.4.4/debian/ros-diamondback-object-manipulation/opt/ros/diamondback/stacks/object_manipulation/object_manipulator/src/object_manipulator.cpp
function: ObjectManipulator::pickup
line: 240
topics[]
topics[0]: /rosout
topics[1]: /object_manipulator/grasp_execution_markers
topics[2]: /object_manipulator/object_manipulator_pickup/result
topics[3]: /object_manipulator/object_manipulator_pickup/feedback
topics[4]: /object_manipulator/object_manipulator_pickup/status
topics[5]: /object_manipulator/object_manipulator_place/result
topics[6]: /object_manipulator/object_manipulator_place/feedback
topics[7]: /object_manipulator/object_manipulator_place/status
topics[8]: /head_traj_controller/point_head_action/goal
topics[9]: /head_traj_controller/point_head_action/cancel
topics[10]: /attached_collision_object
topics[11]: /r_cart/command_pose
topics[12]: /l_cart/command_pose
topics[13]: /move_left_arm/goal
topics[14]: /move_left_arm/cancel
topics[15]: /l_gripper_grasp_posture_controller/goal
topics[16]: /l_gripper_grasp_posture_controller/cancel
topics[17]: /move_right_arm/goal
topics[18]: /move_right_arm/cancel
topics[19]: /r_gripper_grasp_posture_controller/goal
topics[20]: /r_gripper_grasp_posture_controller/cancel
Terminal with pick_and_place_demo.py
[INFO] [WallTime: 1313333951.928096] [0.000000] grasp_executive: waiting for object_manipulator_pickup action
[INFO] [WallTime: 1313333952.319281] [3134.483000] grasp_executive: object_manipulator_pickup action found
[INFO] [WallTime: 1313333952.405726] [3134.490000] grasp_executive: waiting for object_manipulator_place action
[INFO] [WallTime: 1313333953.660155] [3134.612000] grasp_executive: object_manipulator_place action found
[INFO] [WallTime: 1313333953.780220] [3134.621000] grasp_executive: waiting for point_head_action client
[INFO] [WallTime: 1313333955.345885] [3134.802000] grasp_executive: point_head_action client found
[INFO] [WallTime: 1313333955.620685] [3134.824000] grasp_executive: waiting for reactive place clients
[INFO] [WallTime: 1313333956.402844] [3134.915000] grasp_executive: reactive place clients found
[INFO] [WallTime: 1313333956.404042] [3134.915000] initializing controller managers for both arms ...add a comment