
Visualization of odometry msgs

Hi,
my question is related to the code of odometry msgs at http://www.ros.org/wiki/navigation/Tu...
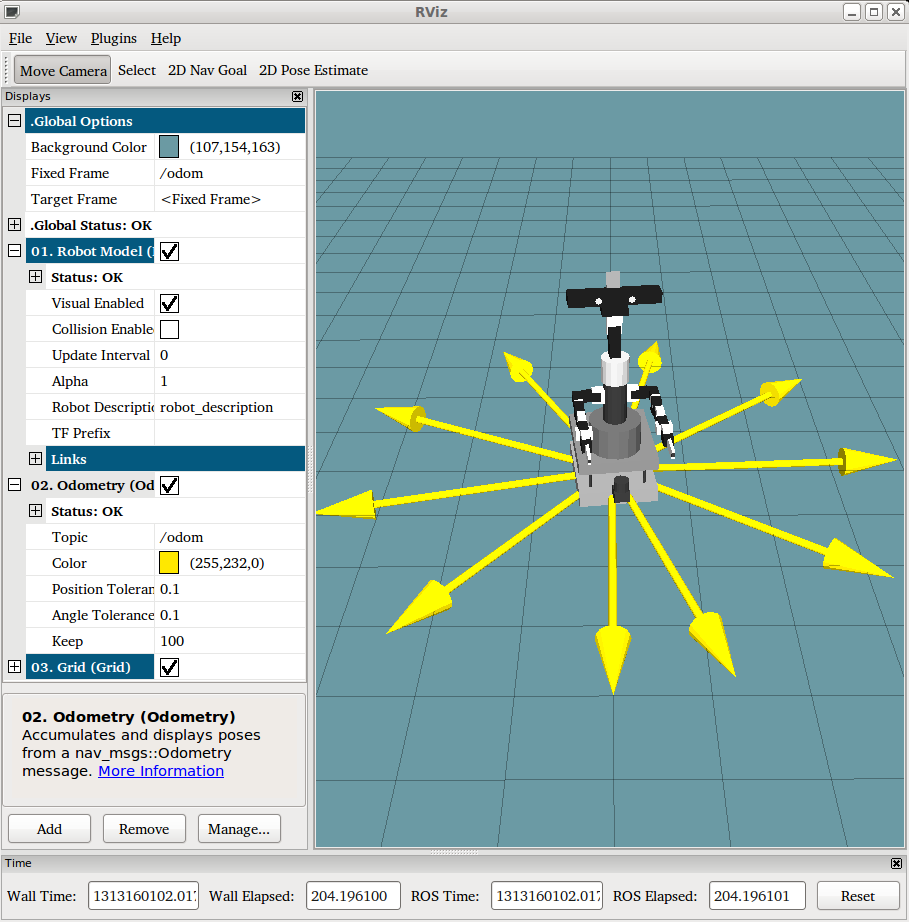
How can I visualize a series of odometry msgs in rviz. How do I have to configure rviz to get a sequence of arrows illustrating path and velocity? If I start the small example together with rviz (fixed frame = /base_link) I see with target frame = <fixed frame=""> one stationary arrow?
Best wishes
Poseidonius
add a comment

{kind=link}