The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2016-02-24 12:21:57 -0500 | received badge | ● Good Question (source) |
| 2015-12-24 00:30:48 -0500 | received badge | ● Taxonomist |
| 2015-12-12 01:19:00 -0500 | received badge | ● Famous Question (source) |
| 2015-09-01 00:38:27 -0500 | marked best answer | simulation for hector slam in ground robot hello, I want to run a simulation with hector slam in a ground robot (with laser, odom and imu). I want to use the final gridmap and the estimated robot position. Anyone knows an alternative to hector_quadrotor_demo but with a ground robot? many thanks, Filipe |
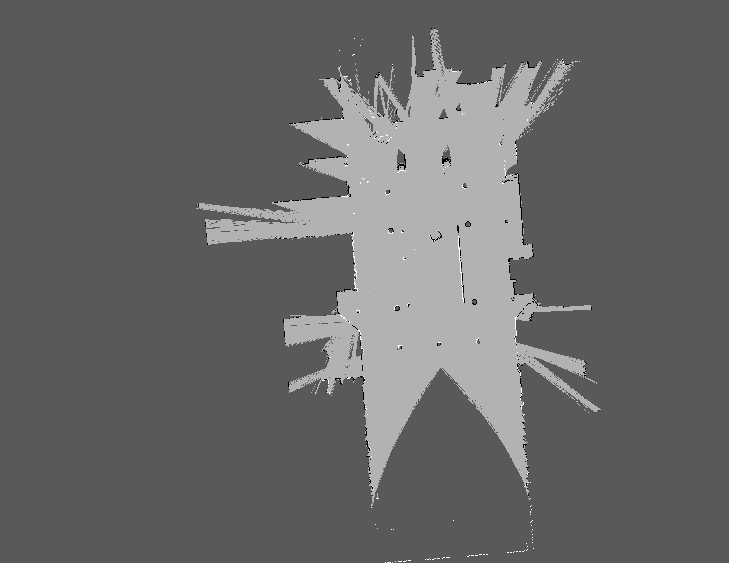
| 2015-08-31 21:03:41 -0500 | marked best answer | Hector SLAM+SICK (use_tf_scan_transformation true or false?) Hello, I am getting some troubles with Hector SLAM with (use_tf_scan_transformation=true) I get this map:
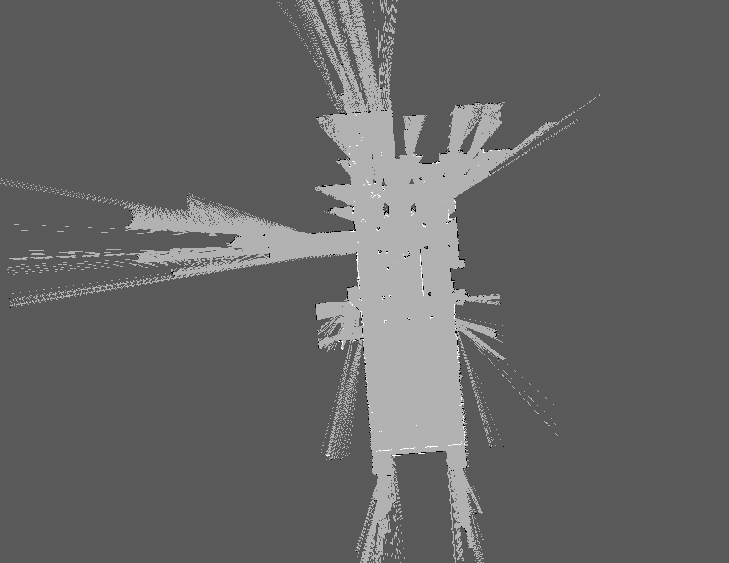
with (use_tf_scan_transformation=false) I get this map:
Of course the second one is much better (in the first, it seems that hector can't do mapping longer them X feets). Anyone can help-me and explain-me why this happens? If anyone wants to try build a map with the bag file, please download: bag file: http://fbnsantos.com/Download/bag.tar.gz (in this bag please ignore the map in map topic, and use the launch and consider mapHector) launch file: http://fbnsantos.com/Download/ProAGV_Mapping_Hector_Slam_1.launch We have two laser scanners, but we are interested only in Nav350Scan (which is a Sick Laser). We have developed the driver for this laser, so if you suspect that the problem is in publish data please tell-me. If anyone known other driver for this laser (Sick Nav 350 Scan) please tell advise-me. |
| 2015-06-22 00:30:34 -0500 | marked best answer | Waypoints with orientation + Smooth trajectory Hello, I have a ground robot ( 4 wheels like a car) a I have my missions defined by a set of waypoints ( x, y, yaw (position and orientation)). I want that my robot moves through these waypoints with the specified orientation in each waypoints. The path should be smooth (using splines or Bezier curve) but intersect the waypoints. Does anyone known any package for this purpose? Regards, Filipe |
| 2014-07-22 11:19:07 -0500 | received badge | ● Famous Question (source) |
| 2014-04-20 06:50:24 -0500 | marked best answer | OpenCV 2.4.0 vs 2.3.1 + ROS Fuerte Hello I'm facing problems with ROS and OpenCV, I have my stuffs developed in 2.3.1 and ROS is comming with opencv 2.4.0, and I'm also facing problem in RGBDSLAM. My questions: Should i update everything to 2.4.0? |
| 2014-04-20 06:50:23 -0500 | marked best answer | RGBDSLAM Problem compilation (fuerte and cv 2.4.0)( solved) Hello I'm compiling the rgbdslam (like http://www.ros.org/wiki/rgbdslam). And i get problems: (Ubuntu 12.04; ROS Fuert; PCL 1.5.1; OpenCv 2.3.1(in OS) and opencv 2.4.0 (in ros)) UPDATE RESOLUTION In rgbdslam/src/openni_listener.cpp: //#include "pcl/common/transform.h" (i think this not exist yet! is now transforms.h) ... //#include "pcl/ros/for_each_type.h" (libpcl1.5, don't have this?!) in rgbdslam/src/glviewer.cpp (add):
#include "GL/glut.h"
...
#include "boost/foreach.hpp"
#include "pcl/point_types.h"
...
template <typename PointType>
inline bool hasValidXYZ(const PointType& p){
return std::isfinite(p.x) && std::isfinite(p.y) && std::isfinite(p.z);
};
in rgbdslam/src/misc.cpp (add): #include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/nonfree/nonfree.hpp"
...
// based on http://answers.ros.org/question/30249/minimal-topics-for-rgbdslam
sensor_msgs::ImagePtr rgb_msg(new sensor_msgs::Image);
rgb_msg->header = rgb_msg1->header;
rgb_msg->height = rgb_msg1->height;
rgb_msg->width = rgb_msg1->width;
rgb_msg->encoding = rgb_msg1->encoding;
rgb_msg->is_bigendian = rgb_msg1->is_bigendian;
rgb_msg->step = rgb_msg1->step;
rgb_msg->data = rgb_msg1->data;
if (rgb_msg->encoding.compare("bgr8") == 0) {
rgb_msg->encoding = "rgb8";
for (int i=0; i<rgb_msg->data.size(); i+=3) {
char temp_red = rgb_msg->data[i];
rgb_msg->data[i] = rgb_msg->data[i+2];
rgb_msg->data[i+2] = temp_red;
}
}
....
in line 287
fd = new SiftFeatureDetector(); //SIFT::DetectorParams::GET_DEFAULT_THRESHOLD(),
//SIFT::DetectorParams::GET_DEFAULT_EDGE_THRESHOLD());
ROS_INFO("Default SIFT threshold:"); /*%f, Default SIFT Edge Threshold: %f",
SIFT::DetectorParams::GET_DEFAULT_THRESHOLD(),
SIFT::DetectorParams::GET_DEFAULT_EDGE_THRESHOLD());*/
...
in line 310:
fd = new OrbFeatureDetector();//params->get<int>("max_keypoints"),
//ORB::CommonParams(1.2, ORB::CommonParams::DEFAULT_N_LEVELS, 31, ORB::CommonParams::DEFAULT_FIRST_LEVEL));
}
in CMAKEFILE SET(LIBS_LINK GL GLU -lgl2ps ${G2O_LIBS} ${QT_LIBRARIES} ${QT_QTOPENGL_LIBRARY} ${GLUT_LIBRARY} ${OPENGL_LIBRARY} ${OpenCV_LIBS} -lboost_signals)
And now appears to work :) :D ;) |
| 2014-04-20 06:50:21 -0500 | marked best answer | Build, compress, optimize tool for ros+linux to OS dedicated Hello, It will be possible to have? or is someone work in? a tool to build a small app+OS dedicated, based on our stack. I mean, that compress and optimize:
Which will result in a tar with:
|
| 2014-04-20 06:50:19 -0500 | marked best answer | rosbuild manifest.xml error [SOLVED] Hello, I have installed ros fuerte in ubuntu 12.04. Now I am compiling my stuff, but i get this error (in electric+ubuntu10.10 works perfectly): rosbuild manifest.xml error [rosbuild] Building package hyselam_topo [rosbuild] Error from syntax check of hyselam_topo/manifest.xml My manifest file: <package> <description brief="hyselam_topo"> hyselam_topo </description> <author>fbnsantos</author> <license>BSD</license> <review status="unreviewed" notes=""/> <url>http://ros.org/wiki/hyselam_topo</url> <depend package="std_msgs"/> <depend package="rospy"/> <depend package="roscpp"/> <depend package="rosbag"/> <depend package="bfl"/> <depend package="geometry_msgs"/> <depend package="sensor_msgs"/> <depend package="nav_msgs"/> <depend package="tf"/> <depend package="image_transport"/> <depend package="opencv2"/> <depend package="cv_bridge"/> <depend package="qt_build"/> <depend package="roscpp"/> <depend package="std_msgs"/> <rosdep name="libqt4-dev"/> <rosbuild2> <depend="" package="qt_build"/> <depend package="roscpp"/> <depend package="std_msgs"/> <rosdep name="libqt4-dev"/> </rosbuild2>> Can someone help me on this? Another related question: I have tried with <rosdep name="libqt4-dev"/> and with <depend package="libqt4-dev"/> what is the diference here? |
| 2014-04-20 06:50:17 -0500 | marked best answer | ROS for ubuntu precise 12.04 Hello, There is any date for the launch of a ros realease for ubuntu 12.04? There is any beta repository available? Many thanks, Filipe |
| 2014-04-20 06:50:13 -0500 | marked best answer | Door detection for topological map Hello I'm working with topological maps, and at this moment I need some implementation for door detection. Because this is challenge problem and is not my core of reasearch could someone suggest any implementation ready or nearly-ready to run? (in the sensor we have laser 2d and mono and stereo camara! ) Thanks, Filipe |
| 2014-04-20 06:48:45 -0500 | marked best answer | gmapping and inversion Hokuyo don't work Hello, I'm trying to use the hokuyo on my robot, from upside down. (inverted position) On Rviz all frames are correct and I see the the laser points perfect (rotated), but gmapping is ignoring the fact of my transformation:
and the mapping is not coherent with what hokuyo senses. As i like show on next images, can someone help-me? (I can't implement slam this way) ( I have tried with
|
| 2014-01-28 17:30:10 -0500 | marked best answer | Speech recognition packages Hello, I am looking for speech recognition packages. Someone can help-me with suggestions. This is complex problem, it is required that applications are all the time listening and processing the information. This is not the core of my work but i need something that translates voice to text. I have found (http://www.pirobot.org/blog/0022/ and https://code.google.com/p/ros-pocketsphinx-speech-recognition-tutorial/wiki/Tutorial) which uses pocketsphinx, but from what I have seen is not accurate and is required to build a dictionary of words. Another solution is using the google framework (http://blog.achuwilson.in/2012/06/speech-recognition-in-ros-linux.html), but it is required internet connection and can take more the 3 seconds to get an answer. Another option is use Julian (http://achuwilson.wordpress.com/2012/01/11/speech-recogition-using-julius-in-linux/) from video looks great. The Hark seems to be powerful but they are using multiples microphones for localization also. (http://www.ros.org/wiki/hark, http://winnie.kuis.kyoto-u.ac.jp/HARK/wiki.cgi?page=HARK-ROS+Installation+Instructions) I need something light then HARK and more efficient then pocketsphinx. I think that I will start with HARK. Can you give-me others suggestions? Thanks |
| 2014-01-28 17:29:58 -0500 | marked best answer | How publish an "YUV422 packed" image, aravis + basler Hello, I am using aravis driver+ basler camera + Camara_aravis node. My camera can only give images with format: -ARV_PIXEL_FORMAT_YUV_422_PACKED -ARV_PIXEL_FORMAT_YUV_422_YUYV_PACKED -ARV_PIXEL_FORMAT_BAYER_BG_8 -ARV_PIXEL_FORMAT_BAYER_BG_12 I have changed Camara_aravis node msg.encoding = sensor_msgs::image_encodings::YUV422 ; But when I subscribe the image: rosrun image_view image_view image:=/cam1/image_raw theora I get an image with wrong colors (blue is yellow, blue is orange...). I think that the problems comes from ARV_PIXEL_FORMAT_YUV_422_PACKED format which is different of sensor_msgs::image_encodings::YUV422. How can I fix this? If I use ARV_PIXEL_FORMAT_BAYER_BG_8 with sensor_msgs::image_encodings::BAYER_BGGR8. I get a crash: terminate called after throwing an instance of 'cv_bridge::Exception' what(): Unsupported conversion from [bayer_bggr8] to [rgb8] Aborted (core dumped) What is the best way to publish images of this format? My regards, |
| 2014-01-28 17:27:51 -0500 | marked best answer | Generalized Voronoi graph (any package?) hello, I need to obtain a generalized Voronoi graph (GVG) from a grid map (like described here: http://www.sfbtr8.uni-bremen.de/project/r3/HGVG/hierarchicalVGraphs.html#Ref_2). I have implemented my own node, but there still some tricks to solve and is not very efficient (i have used opencv libraries (cv::distanceTransform) but to obtain GVG from GVD there are lots of tricks). Anyone knows any package that process the generalized Voronoi graph from the map? Regards |
| 2014-01-28 17:27:50 -0500 | marked best answer | qtcreator fuerte and ubuntu 12.04 hello, I am trying to use qtcreator with fuerte and ubuntu 12.04. When make rosmake on shell it is all fine! When i run qtcreator in the shell or out and i try to open the cmakelist.txt. I get from erro form qtcreator: [rosbuild] Error from syntax check of hyselam_topo/manifest.xml CMake Error at /opt/ros/fuerte/share/ros/core/rosbuild/private.cmake:78 (message): [rosbuild] Syntax check of hyselam_topo/manifest.xml failed; aborting Call Stack (most recent call first): /opt/ros/fuerte/share/ros/core/rosbuild/public.cmake:174 (_rosbuild_check_manifest) CMakeLists.txt:18 (rosbuild_init) What could be? |
| 2014-01-28 17:27:50 -0500 | marked best answer | ROS node bridge for publish special topics over the internet Hello, I want a ROS node bridge to subscribe some topics (on my ros machine) and publish them over the internet, to other node that listen this and publish this in another machine with ROS. I want that each machine have a roscore running in an independent way. Is there any tool or package to do this? or should I do my own node for each situation? Regards, Filipe |
| 2014-01-28 17:26:13 -0500 | marked best answer | Manage Waypoints on Rviz Hello, I have a ground-robot (2D) and I want to manage (insert,delete and move) a simple set of waypoints in rviz, that will be used to define the path! (i will subscribe the map of gmapping) What solution there is available for this? I have see the interactive markers, i don't need a complex solution like this! Thanks |
| 2014-01-28 17:25:43 -0500 | marked best answer | ROS Fuerte in Multiple machines Hello, In ros fuerte i can't communicate from slave to the master! can someone help-me? I have in the bash script for master this: at the slave the same. In the slave i make rostopic list and i see all publications. but when i run a node, in the slave pc, that should publish something, the master can't ear anything! (if run the publisher in the master and subscriber in the slave it works, the inverse not!!!!) If i run the same node in the master everything runs ok! What could be the problem? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.