The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-10-24 05:45:26 -0500 | received badge | ● Popular Question (source) |
| 2019-10-24 05:45:26 -0500 | received badge | ● Notable Question (source) |
| 2019-10-24 05:45:26 -0500 | received badge | ● Famous Question (source) |
| 2019-03-22 03:11:47 -0500 | received badge | ● Notable Question (source) |
| 2019-03-22 03:11:47 -0500 | received badge | ● Famous Question (source) |
| 2018-02-21 06:35:04 -0500 | received badge | ● Famous Question (source) |
| 2017-04-20 14:55:49 -0500 | received badge | ● Famous Question (source) |
| 2017-04-20 13:43:22 -0500 | marked best answer | roscd: command not found Hi I faced this error: "roscd: command not found" same as rosnode except for roscore. I have already setup my .bashrc by "source /opt/ros/jade/setup.bash" Thanks |
| 2016-11-07 17:04:01 -0500 | received badge | ● Famous Question (source) |
| 2016-10-20 08:56:36 -0500 | received badge | ● Notable Question (source) |
| 2016-08-17 09:15:13 -0500 | received badge | ● Famous Question (source) |
| 2016-06-02 06:29:43 -0500 | asked a question | pcl::KdTreeFLANN<pcl::PointXYZ> gives memory corruption! When I add the following line into my code, I get memory corruption error: pcl::KdTreeFLANN<pcl::pointxyz> kdtree; In fact i'm subscribing to "/rtabmap/cloud_map" (using turtlebot RTAB-map) and do some processes. All the processes works well except when I add that line of KdTreeFLANN the program crashes. I appreciate if anyone helps me. Thanks. |
| 2016-06-02 06:19:23 -0500 | received badge | ● Famous Question (source) |
| 2016-06-02 06:18:13 -0500 | received badge | ● Popular Question (source) |
| 2016-05-18 21:24:41 -0500 | received badge | ● Notable Question (source) |
| 2016-05-09 20:54:32 -0500 | marked best answer | Turtlesim pose I'm using the following code to generate a time-dependent velocity command for the turtle %%%%%%%%%%%%%%%%%%% int main(int argc, char**argv) { ros::init(argc, argv, "pub_one"); ros::NodeHandle n; ros::Publisher pub = n.advertise<turtlesim::velocity>("/turtle1/command_velocity", 1000); srand(time(0)); double secs1 =ros::Time::now().toSec(); while(pub.getNumSubscribers() == 0) ros::Duration(0.1).sleep(); ros::Rate r(1); while(true) { turtlesim::Velocity msg; double secs2 =ros::Time::now().toSec(); double secs3=secs2-secs1; msg.linear=.2*secs3; msg.angular=.2*secs3; pub.publish(msg); ROS_INFO("Sending random velocity command: linear=%f angular=%f time=%f", msg.linear, msg.angular,secs3); ros::spinOnce(); r.sleep(); } } %%%%%%%%%%%%%%%% I don't know how I can change the code to get the position of the turtle at each time? In fact, I wanna make a feedback control by using the position of the turtle and a desired position. I really appreciate if you help me in this case! |
| 2016-04-28 20:40:10 -0500 | asked a question | V-REP crashes! Hi there When I load and run the youbot model in V-REP it crashes. Here is the error I will be thankful if you can help me. Thanks. |
| 2016-03-15 21:29:19 -0500 | commented answer | Unmet dependencies while installing ROS Jade on Ubuntu 14.04.2 Check the following link: |
| 2016-03-15 04:35:01 -0500 | answered a question | Unmet dependencies while installing ROS Jade on Ubuntu 14.04.2 Apparently, ROS Jade has some issues with Ubuntu 14.04 as I faced too. |
| 2016-03-15 03:16:57 -0500 | commented question | Problem of using Turtlebot to process image. I haven't worked with opencv but I used ROS-PCL. There I get the point cloud using ROS messages then convert it to PCL data and process the data then covert it back to ROS message. I think for opencv also should work the same. btw you define a ros node and you never used it, is it correct way? |
| 2016-03-15 02:23:36 -0500 | commented answer | Ros-Arduino subscriber Thanks, the main issue was the Arduino couldn't read large messages with high publishing rate. Instead of sending sensor_msgs::LaserScan I sent std_msgs::Float32 message with low publish rate and could see the messages in Arduino Uno. |
| 2016-03-14 11:13:54 -0500 | received badge | ● Notable Question (source) |
| 2016-03-14 09:32:42 -0500 | received badge | ● Popular Question (source) |
| 2016-03-14 01:40:59 -0500 | received badge | ● Famous Question (source) |
| 2016-03-13 22:47:20 -0500 | edited question | How to read LaserScan by Arduino? Hi I'm using Xtion sensor to get LaserScan data using the following commands: I can read /scan which is type "sensor_msgs/LaserScan". I want to use this data in Aurdoino board. I think, I have to use the following headers in Arduino code : and the following codes: Now how I can access to scan array? I appreciate if you help me. EDIT: I could finally find the issue. My Arduino board cannot read large data with high rate of publishing. So I just publish a std_msgs::Float32 message with low publish rate. |
| 2016-03-13 22:02:28 -0500 | answered a question | Subscribe and Publish a arbitrary topic! Thanks I solved my problem. Here is the code: |
| 2016-03-13 21:22:50 -0500 | asked a question | Subscribe and Publish a arbitrary topic! Hi I would like to subscribe to the Laserscan data and process it and publish something. Unfortunately, I keep getting error. I appreciate if you help. here is my code: Thanks in advance for your help. |
| 2016-03-13 20:37:11 -0500 | commented answer | How to read LaserScan by Arduino? I should note that, I add a command in callback function to on the LED but it doesn't on it. |
| 2016-03-13 20:37:08 -0500 | commented answer | How to read LaserScan by Arduino? I should note that, I add a command in callback function to on the LED but it doesn't on it. |
| 2016-03-13 20:36:12 -0500 | commented answer | How to read LaserScan by Arduino? Thank you for your reply! I tried different baud rates but nothing changed! I think the issue is the Laserscan data is too large and it cannot call the callback function! (just a guess) |
| 2016-03-13 20:35:18 -0500 | commented answer | How to read LaserScan by Arduino? Thank you for your reply! My issue is not that as I also used only one serial connection! I think the issue is the Laserscan data is too large and it cannot call the callback function! (just a guess) |
| 2016-03-11 01:08:36 -0500 | received badge | ● Notable Question (source) |
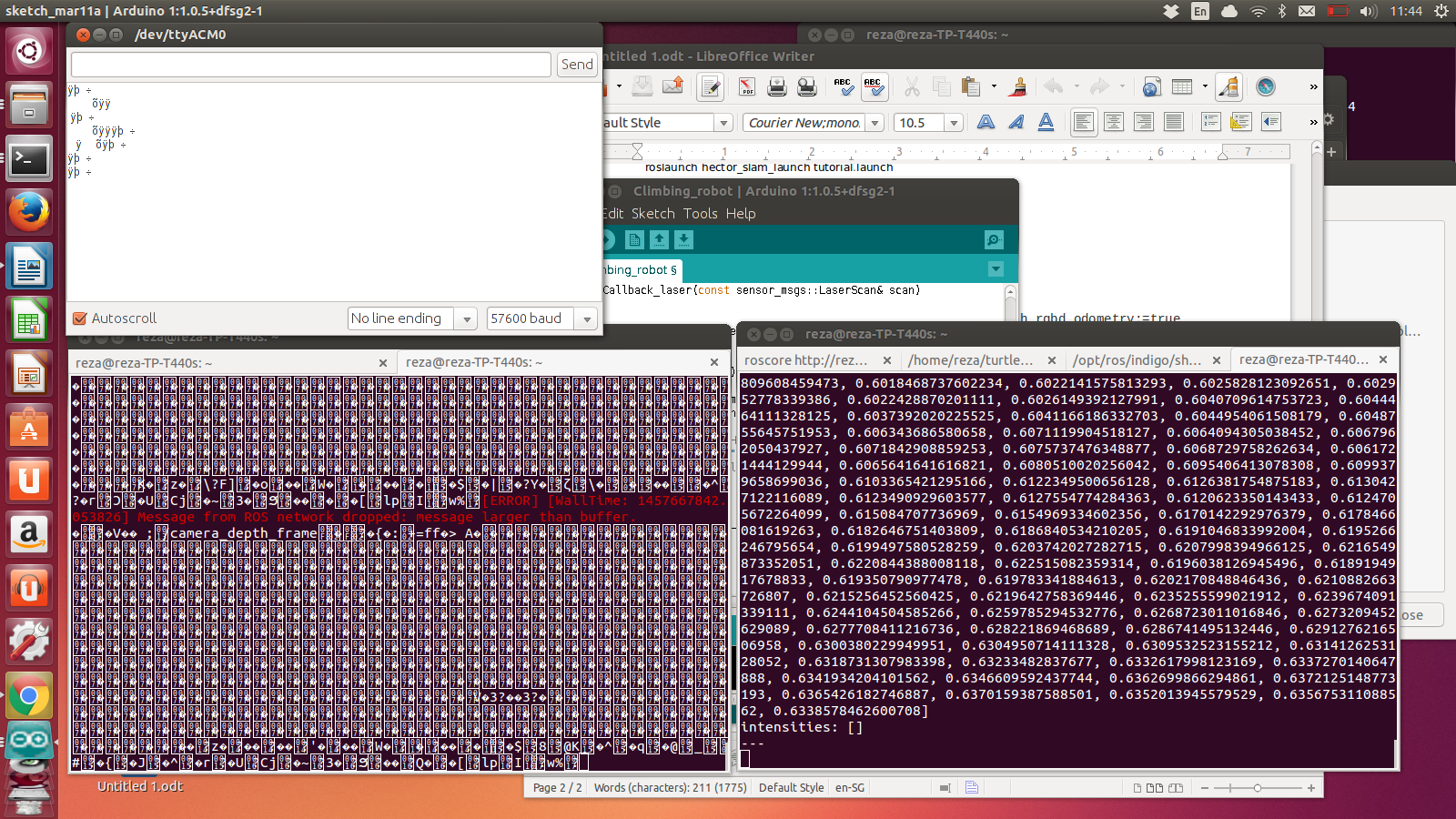
| 2016-03-10 22:14:20 -0500 | answered a question | How to read LaserScan by Arduino? I would like to summarize all the issues I faced and how I solved it: First issue: The following error in uploading the program: avrdude: ser_recv(): programmer is not responding avrdude: stk500_recv(): programmer is not responding There were some solution using reset bottom but it didn't work for me. I finally found out I should use "sudo arduino" to lunch the arduino and after that I can easily upload. Second issue: using "sudo arduino" gave me this error: fatal error: ros.h: No such file or directory compilation terminated. Unfortunately methods in internet didn't help me. I just tried to copy ros-lib form sketchbook to "/usr/share/arduino/libraries" and Hallelujah the error was gone! :) Finally the main part of my code is as follows: I thought, it works fine but apparently it doesn't! When I put a command in callback function to on the LED it doesn't on the LED. I think the reason is the laserscan data is too large! (Not Sure Though) Even when I run "Hello World" program in ros-arduino tutorial, hello world with those strange characters are printed! In the following attached picture you can see the results. right terminal I run "rostopic echo /scan"; left terminal I run "rosrun rosserial_python serial_node.py _port:=/dev/ttyACM0", and top is Serial monitor.
|
| 2016-03-10 21:12:10 -0500 | commented answer | How to read LaserScan by Arduino? Sorry I face other issues in working with arduino, after I solve I will reply your comment. Thanks |
| 2016-03-10 11:19:58 -0500 | received badge | ● Popular Question (source) |
| 2016-03-10 02:23:30 -0500 | commented answer | Ros-Arduino subscriber I put that command in callback the LED was just off but when put in void loop() it start blinking. Seems the callback function is not executed. |
| 2016-03-10 02:12:26 -0500 | commented question | Ros-Arduino subscriber When I put Serial.print("Hello = :"); inside void loop() I can see the message, but I cannot see any message when it's inside callback |
| 2016-03-10 02:09:53 -0500 | commented answer | Ros-Arduino subscriber Thanks, I forgot to add it here. I edited my question. |
| 2016-03-10 02:04:16 -0500 | received badge | ● Student (source) |
| 2016-03-10 01:58:28 -0500 | asked a question | Ros-Arduino subscriber Hi I would like to send a message to arduino serial monitor, here is my code but nothing will appear in serial monitor! Could you please tell me what is the problem with my code? Thanks in advance for your help. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.